


hello everyone.
i have problem receiving data from ADS1291.
because of the data i get from ADS1291 is weird. so i check the first 24 bits which are status register.
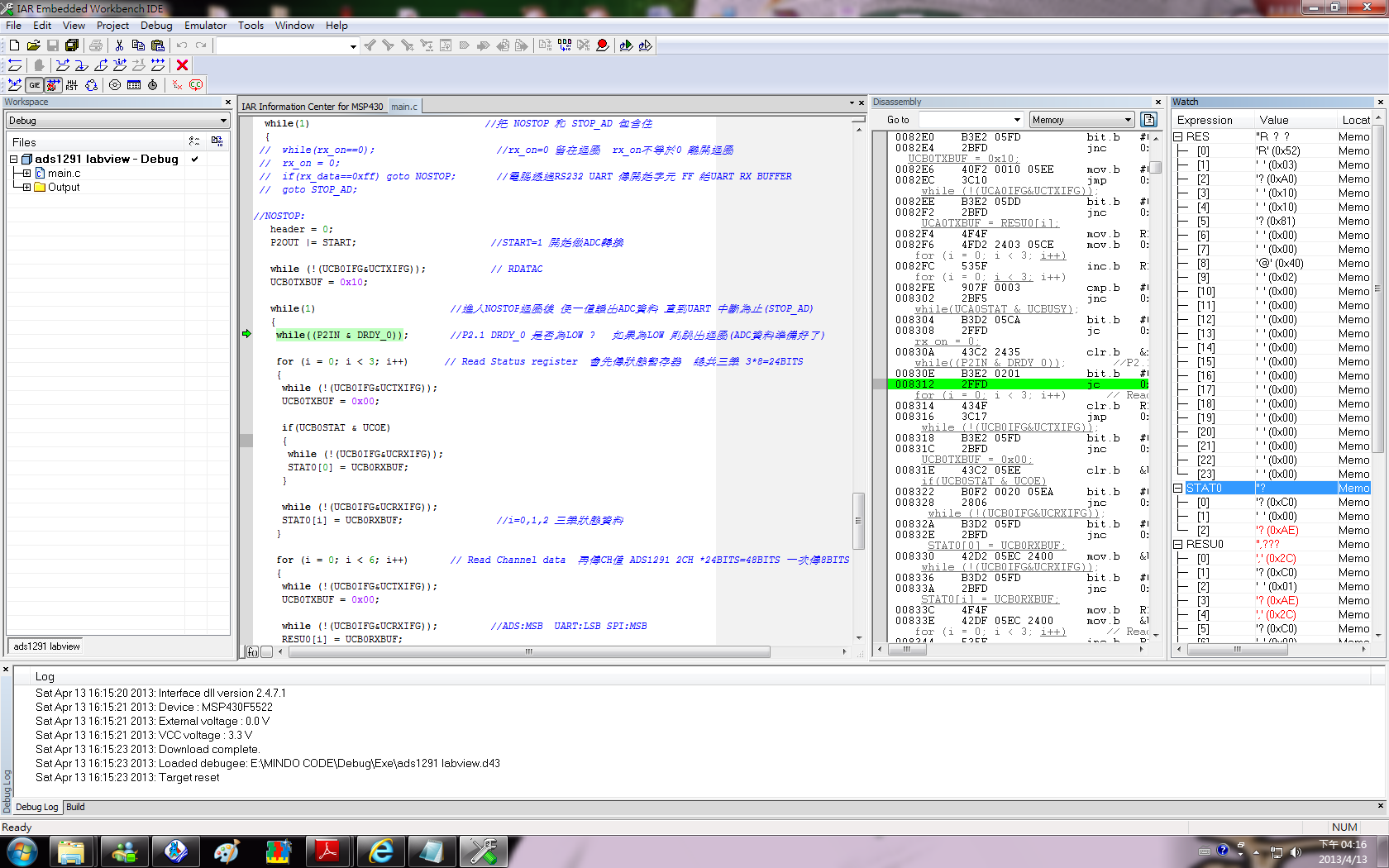
i save the Status registers in STAT[0] to STAT[2]
the status register supposed to be 0XC0 0X00 0X00
but i got wrong data.
and save the output two channel data in RESU0[0] to RESU0[5]
but i alraedy power down CH2. but still get reading from RESU0[3] to RESU0[5]
anyone can help me?
and also here is my MSP430F5522 Firmware to retreving data from ADS1291
#include <msp430f5529.h>
#include <math.h>
#define START 0x80 // P2.7
#define PWDN 0xFE // P2.0
#define RESET_BT 0xBF // P2.6
#define DRDY_0 0x02 // P2.1
#define CS_0 0xEF // P4.4
char STAT0[3], RESU0[24], STAT1[3], RESU1[24], RES[24];
char LOFF_P0, LOFF_N0, LOFF_P1, LOFF_N1, header, rx_data, rx_on=0, tx_on=0;
void configure_uart(void)
{
P3SEL |= BIT3 + BIT4; // P3.3,4 = USCI_A0 TXD/RXD
UCA0CTL1 |= UCSWRST; // **Put state machine in reset**
UCA0CTL1 |= UCSSEL_2; // SMCLK
UCA0BR0 = 0x08; // 8MMHz 921600 (see User's Guide)
UCA0BR1 = 0x00; // 8MMHz 921600
UCA0MCTL |= UCBRS_6 + UCBRF_8; // Modulation UCBRSx=1, UCBRFx=0
UCA0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
UCA0IE |= UCRXIE; // Enable USCI_A0 RX inter
}
void configure_spi(void) //�b�o��]�wport4(�Ѧh�u��) P4DIR P4OUT
{
// P1DIR |= 0x80 P1.7 for RESET_ADS
P2DIR |= 0XC1; // P2.0, 6, 7 for PWDN, RESET_BT, START
P3SEL |= BIT0 + BIT1 + BIT2; // P3.0, 1, 2 SPI option select
P4DIR |= 0X1F; // P2OUT |= ~CS_0 + ~CS_1
// P4.0, 1, 2, 3, 4 for A0, A1, A2, A3, E*
P4OUT |= ~CS_0 ; // Disable CS �Ѧh�u�� E* = 1 Y0 - Y15 =1
UCB0CTL1 |= UCSWRST; // **Put state machine in reset**
UCB0CTL0 |= UCMST+UCSYNC+UCMSB; // 3-pin, 8-bit SPI master, MSB
UCB0CTL1 |= UCSSEL_2; // SMCLK
UCB0BR0 = 0x02; // /2 8.192/2 =4.096 ���� 4.096 = 2*2.048
UCB0BR1 = 0x00; //
UCB0CTL1 &= ~UCSWRST; // **Initialize USCI state machine*
}
void main(void)
{
char i;
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
P5SEL |= BIT2+BIT3; // Port select XT2
UCSCTL6 &= ~XT2OFF; // Enable XT2
UCSCTL3 |= SELREF_2; // FLLref = REFO
// Since LFXT1 is not used,
// sourcing FLL with LFXT1 can cause
// XT1OFFG flag to set
UCSCTL4 |= SELA_2; // ACLK=REFO,SMCLK=DCO,MCLK=DCO
// Loop until XT1,XT2 & DCO stabilizes - in this case loop until XT2 settles
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG);
// Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
UCSCTL6 &= ~XT2DRIVE0; // Decrease XT2 Drive according to
// expected frequency
UCSCTL4 |= SELS_5 + SELM_5; // SMCLK=MCLK=XT2
configure_uart();
configure_spi(); // Setup SPI
P2OUT &= PWDN; //PWDN = 0
P2OUT &= RESET_BT; // P2.6 RESET_BT
P2OUT &= ~START; //START = 0
P2OUT |= ~PWDN; //PWDN = 1
//P2OUT |= ~CLKSEL; // CLKSEL Pin =1 (����������512KHZ)
P4OUT &= CS_0; // CS=0 CS Enable
while (!(UCB0IFG&UCTXIFG)); // SDATAC
UCB0TXBUF = 0x11;
while (!(UCB0IFG & UCTXIFG)); // RREG starting at address 0 00100001 00h �}�lŪ
UCB0TXBUF = 0x20;
while (!(UCB0IFG & UCTXIFG)); // Ū1�� Registers
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCTXIFG)); // first dummy data
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCTXIFG)); // another dummy data
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[0] = UCB0RXBUF;
while (!(UCB0IFG&UCTXIFG)); //�q01h�}�l�g
UCB0TXBUF = 0x41;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); //�g1�ӼȦs��
UCB0TXBUF = 0x00;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); // WREG CONFIG1 0x03 00000011 continuous mode, Data rate = 1KSPS
UCB0TXBUF = 0x03;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); //�q09h�}�l�g
UCB0TXBUF = 0x49;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); //�g1�ӼȦs��
UCB0TXBUF = 0x00;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); // WREG RESP1 0x02 00000010
UCB0TXBUF = 0x02;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); //�q02h�}�l�g
UCB0TXBUF = 0x42;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); //�g2�ӼȦs��
UCB0TXBUF = 0x01;
for (i = 0; i < 10; i++);
while (!(UCB0IFG&UCTXIFG)); // WREG CONFIG2 0xA0 10100000 internal reference 2.4 V
UCB0TXBUF = 0xA0;
while (!(UCB0IFG&UCTXIFG)); // WREG Lead-Off Control Register 0x10 00010000
UCB0TXBUF = 0x10;
while (!(UCB0IFG&UCTXIFG)); //�q04h�}�l�g
UCB0TXBUF = 0x44;
while (!(UCB0IFG&UCTXIFG)); //�g��ӼȦs��
UCB0TXBUF = 0x01;
while (!(UCB0IFG&UCTXIFG)); // WREG CH1 0x10 00010000
UCB0TXBUF = 0x10;
while (!(UCB0IFG&UCTXIFG)); // WREG CH2 0x81 10000001 power down CH2
UCB0TXBUF = 0x81;
while (!(UCB0IFG&UCTXIFG)); //�q08h�}�l�g
UCB0TXBUF = 0x48;
while (!(UCB0IFG&UCTXIFG)); //�g�@�ӼȦs��
UCB0TXBUF = 0x00;
while (!(UCB0IFG&UCTXIFG)); // 01000000 CLK_DIV = 1 , CLK = 2.048MHZ
UCB0TXBUF = 0x40;
while(UCB0STAT & UCBUSY);
while (!(UCB0IFG & UCTXIFG)); // RREG starting at address 1 00100001 01h �}�lŪ
UCB0TXBUF = 0x21;
while (!(UCB0IFG & UCTXIFG)); // Ū9�� Registers
UCB0TXBUF = 0x08;
while (!(UCB0IFG & UCTXIFG)); // first dummy data
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCTXIFG)); // another dummy data
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[1] = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[2] = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[3] = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[4] = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[5] = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[6] = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[7] = UCB0RXBUF;
while (!(UCB0IFG & UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[8] = UCB0RXBUF;
UCB0TXBUF = 0x00;
while (!(UCB0IFG & UCRXIFG));
RES[9] = UCB0RXBUF;
while(UCB0STAT & UCBUSY); //SPI �p�GUCBUSY=0 ���m �p�GUCBUSY=1 USCI ���b�����ζǿ�
_EINT();
P2OUT |= ~RESET_BT;
while(1) //�� NOSTOP �M STOP_AD �]�t��
{
while(rx_on==0); //rx_on=0 �d�b�j�� rx_on������0 ���}�j��
rx_on = 0;
if(rx_data==0xff) goto NOSTOP; //�q���z�LRS232 UART �Ƕ}�l�r�� FF ��UART RX BUFFER
goto STOP_AD;
NOSTOP:
header = 0;
P2OUT |= START; //START=1 �}�l��ADC�ഫ
while (!(UCB0IFG&UCTXIFG)); // RDATAC
UCB0TXBUF = 0x10;
while(1) //�i�JNOSTOP�j��� �K�@��Ū�XADC��� ����UART ���_����(STOP_AD)
{
while((P2IN & DRDY_0)); //P2.1 DRDY_0 �O�_��LOW ? �p�G��LOW �h���X�j��(ADC��ƷdzƦn�F)
for (i = 0; i < 3; i++) // Read Status register �|���Ǫ��A�Ȧs�� �`�@�T�� 3*8=24BITS
{
while (!(UCB0IFG&UCTXIFG));
UCB0TXBUF = 0x00;
if(UCB0STAT & UCOE)
{
while (!(UCB0IFG&UCRXIFG));
STAT0[0] = UCB0RXBUF;
}
while (!(UCB0IFG&UCRXIFG));
STAT0[i] = UCB0RXBUF; //i=0,1,2 �T�����A���
}
for (i = 0; i < 6; i++) // Read Channel data �A��CH�� ADS1291 2CH *24BITS=48BITS �@����8BITS
{
while (!(UCB0IFG&UCTXIFG));
UCB0TXBUF = 0x00;
while (!(UCB0IFG&UCRXIFG)); //ADS:MSB UART:LSB SPI:MSB
RESU0[i] = UCB0RXBUF;
}
RESU0[2]=RESU0[2] & 0xFE; // RESU0[2]�s�Ĥ@��CH �� 7-0 ��BIT? & 11111110
RESU0[2]=RESU0[2] | header; // �o��ݤ����� ���ƻ�n & 0xFE? | header? header �@�άO?
header++; //BIT0 =0,1,0,1,0,1 �O�_��UART�ǿ�?(�_�l0 ����1) 1-0 �}�l�ǰe
if ( header == 2 ) header = 0;
for (i = 0; i < 3; i++) // Send Channel data to BT �Ǥ@��CH��DATA �u����CH1 DATA
{
while (!(UCA0IFG&UCTXIFG)); // USCI_A0 TX buffer ready?
UCA0TXBUF = RESU0[i]; // i=0,1,2
if(rx_on>0 && rx_data==0x00) goto STOP_AD; //�p�G�o��UART���_ �R�O����ADC���� �hrx_on�j��0 �B rx_data=0x00
}
while(UCA0STAT & UCBUSY);
rx_on = 0;
} //�~�� NOSTOP While(1) �j��
STOP_AD:
rx_on = 0;
}
}
#pragma vector=USCI_A0_VECTOR
__interrupt void USCI_A0_ISR(void) //P997 UART ���_ �q�Q�O�q���z�LRS232 UART�Ǹ�Ƶ�RX Buffer �y��RX���_
{
rx_data = UCA0RXBUF; //UART �ϥ� FF��@�}�l�r�� 00��@����r��
rx_on++;
}

