Hi,
This is my program done using Chipkit uno32
#include <SPI.h>
//---------------------------------------------------------------------------------
// vars
String sep = "---------------------------------------------------------";
boolean debug_msg = true;
int n_channels = 0;
int blank = 0;
// SPI
//#define DOUT 7 //MOSI
//#define DIN 8 //MISO
//#define SPICK 14 //SCK
// pins
#define PIN_CS 8
#define PIN_RESET 7
#define PIN_START 11
#define PIN_DRDY 4
#define PIN_LED 13
// register commands
#define READ 0x20
#define WRITE 0x40
// other
int gMaxChan = 2;
int gNumActiveChan = 2;
int activeSerialPort = 0; //data will be sent to serial port that last sent commands. E.G. bluetooth or USB port
boolean gActiveChan [2]; // reports whether channels 1..2 are active
boolean isRDATAC = true;
enum spi_command {
// system commands
WAKEUP = 0x02,
STANDBY = 0x04,
RESET = 0x06,
START = 0x08,
STOP = 0x0a,
// read commands
RDATAC = 0x10,
SDATAC = 0x11,
RDATA = 0x12,
// register commands
RREG = 0x20,
WREG = 0x40,
};
enum reg {
// device settings
ID = 0x00,
// global settings
CONFIG1 = 0x01,
CONFIG2 = 0x02,
LOFF = 0x03,
// channel specific settings
CHnSET = 0X03,
CH1SET = CHnSET + 1,
CH2SET = CHnSET + 2,
// lead off status
RLD_SENS = 0x06,
LOFF_SENS = 0x07,
LOFF_STAT = 0x08,
// other
GPIO = 0x0B,
RESP1 = 0x09,
RESP2 = 0x0A,
};
enum ID_bits {
DEV_ID7 = 0x00,
DEV_ID6 = 0x40,
DEV_ID5 = 0x20,
DEV_ID4 = 0x10,
DEV_ID2 = 0x04,
DEV_ID1 = 0x02,
DEV_ID0 = 0x01,
ID_const = 0x10,
ID_ADS129x = DEV_ID7,
ID_ADS129xR = (DEV_ID7 | DEV_ID6),
ID_4CHAN = 0,
ID_6CHAN = DEV_ID0,
ID_8CHAN = DEV_ID1,
ID_ADS1294 = (ID_ADS129x | ID_4CHAN),
ID_ADS1296 = (ID_ADS129x | ID_6CHAN),
ID_ADS1298 = (ID_ADS129x | ID_8CHAN),
ID_ADS1294R = (ID_ADS129xR | ID_4CHAN),
ID_ADS1296R = (ID_ADS129xR | ID_6CHAN),
ID_ADS1298R = (ID_ADS129xR | ID_8CHAN)
};
enum CONFIG1_bits {
SINGLE_SHOT = 0x00,
BIT6 = 0x00,
BIT5 = 0x00,
BIT4 = 0x00,
BIT3 = 0x00,
DR2 = 0x00,
DR1 = 0x02,
DR0 = 0x00,
CONFIG1_const = 0x02,
//SAMP_125_SPS = CONFIG1_const,
//SAMP_250_SPS = (CONFIG1_const | DR0),
SAMP_500_SPS = (CONFIG1_const | DR1),
//SAMP_1_KSPS = (CONFIG1_const | DR1 | DR0),
//SAMP_2_KSPS = (CONFIG1_const | DR2),
//SAMP_4_KSPS = (CONFIG1_const | DR2 | DR0),
//SAMP_8_KSPS = (CONFIG1_const | DR2 | DR1)
};
enum CONFIG2_bits {
PDB_LOFF_COMP = 0x00,
PDB_REFBUF = 0x20,
VREF_4V = 0x00,
CLK_EN = 0x08,
INT_TEST = 0x00, //amplitude = ±(VREFP – VREFN) / 2400
TEST_FREQ = 0x00,
CONFIG2_const = 0x80,
INT_TEST_1HZ = (CONFIG2_const | INT_TEST | TEST_FREQ),
INT_TEST_DC = (CONFIG2_const | INT_TEST)
};
enum LOFF_bits {
COMP_TH2 = 0x00,
COMP_TH1 = 0x00,
COMP_TH0 = 0x00,
VLEAD_OFF_EN = 0x10,
ILEAD_OFF1 = 0x00,
ILEAD_OFF0 = 0x00,
FLEAD_OFF1 = 0x00,
FLEAD_OFF0 = 0x00,
LOFF_const = 0x10,
COMP_TH_95 = 0x00,
COMP_TH_92_5 = COMP_TH0,
COMP_TH_90 = COMP_TH1,
COMP_TH_87_5 = (COMP_TH1 | COMP_TH0),
COMP_TH_85 = COMP_TH2,
COMP_TH_80 = (COMP_TH2 | COMP_TH0),
COMP_TH_75 = (COMP_TH2 | COMP_TH1),
COMP_TH_70 = (COMP_TH2 | COMP_TH1 | COMP_TH0),
ILEAD_OFF_6nA = 0x00,
ILEAD_OFF_12nA = ILEAD_OFF0,
ILEAD_OFF_18nA = ILEAD_OFF1,
ILEAD_OFF_24nA = (ILEAD_OFF1 | ILEAD_OFF0),
FLEAD_OFF_AC = FLEAD_OFF0,
FLEAD_OFF_DC = (FLEAD_OFF1 | FLEAD_OFF0)
};
enum CHnSET_bits {
PDn = 0x00,
PD_n = 0x00,
GAINn2 = 0x00,
GAINn1 = 0x00,
GAINn0 = 0x00,
MUXn2 = 0x00,
MUXn1 = 0x00,
MUXn0 = 0x00,
CHnSET_const = 0x00,
GAIN_1X = GAINn0,
GAIN_2X = GAINn1,
GAIN_3X = (GAINn1 | GAINn0),
GAIN_4X = GAINn2,
GAIN_6X = 0x00,
GAIN_8X = (GAINn2 | GAINn0),
GAIN_12X = (GAINn2 | GAINn1),
ELECTRODE_INPUT = 0x00,
SHORTED = MUXn0,
RLD_INPUT = MUXn1,
MVDD = (MUXn1 | MUXn0),
TEMP = MUXn2,
TEST_SIGNAL = (MUXn2 | MUXn0),
RLD_DRP = (MUXn2 | MUXn1),
RLD_DRN = (MUXn2 | MUXn1 | MUXn0)
};
enum CH1SET_bits {
PD_1 = 0x00,
GAIN12 = 0x00,
GAIN11 = 0x00,
GAIN10 = 0x00,
MUX12 = 0x00,
MUX11 = 0x00,
MUX10 = 0x00,
CH1SET_const = 0x00
};
enum CH2SET_bits {
PD_2 = 0x00,
GAIN22 = 0x40,
GAIN21 = 0x20,
GAIN20 = 0x00,
MUX22 = 0x00,
MUX21 = 0x00,
MUX20 = 0x00,
CH2SET_const = 0x00
};
enum RLD_SENSP_bits {
RLD8P = 0x00,
RLD7P = 0x00,
RLD6P = 0x00,
RLD5P = 0x00,
RLD4P = 0x00,
RLD3P = 0x00,
RLD2P = 0x00,
RLD1P = 0x00,
RLD_SENSP_const = 0x00
};
enum RLD_SENSN_bits {
RLD8N = 0x00,
RLD7N = 0x00,
RLD6N = 0x00,
RLD5N = 0x00,
RLD4N = 0x00,
RLD3N = 0x00,
RLD2N = 0x00,
RLD1N = 0x00,
RLD_SENSN_const = 0x00
};
enum LOFF_SENSP_bits {
LOFF8P = 0x00,
LOFF7P = 0x00,
LOFF6P = 0x00,
LOFF5P = 0x00,
LOFF4P = 0x00,
LOFF3P = 0x00,
LOFF2P = 0x00,
LOFF1P = 0x00,
LOFF_SENSP_const = 0x00
};
enum LOFF_SENSN_bits {
LOFF8N = 0x00,
LOFF7N = 0x00,
LOFF6N = 0x00,
LOFF5N = 0x00,
LOFF4N = 0x00,
LOFF3N = 0x00,
LOFF2N = 0x00,
LOFF1N = 0x00,
LOFF_SENSN_const = 0x00
};
enum LOFF_FLIP_bits {
LOFF_FLIP8 = 0x00,
LOFF_FLIP7 = 0x00,
LOFF_FLIP6 = 0x00,
LOFF_FLIP5 = 0x00,
LOFF_FLIP4 = 0x00,
LOFF_FLIP3 = 0x00,
LOFF_FLIP2 = 0x00,
LOFF_FLIP1 = 0x00,
LOFF_FLIP_const = 0x00
};
enum LOFF_STATP_bits {
IN8P_OFF = 0x00,
IN7P_OFF = 0x00,
IN6P_OFF = 0x00,
IN5P_OFF = 0x00,
IN4P_OFF = 0x00,
IN3P_OFF = 0x00,
IN2P_OFF = 0x00,
IN1P_OFF = 0x00,
LOFF_STATP_const = 0x00
};
enum LOFF_STATN_bits {
IN8N_OFF = 0x00,
IN7N_OFF = 0x00,
IN6N_OFF = 0x00,
IN5N_OFF = 0x00,
IN4N_OFF = 0x00,
IN3N_OFF = 0x00,
IN2N_OFF = 0x00,
IN1N_OFF = 0x00,
LOFF_STATN_const = 0x00
};
enum GPIO_bits {
GPIOC2 = 0x00,
GPIOC1 = 0x00,
GPIOD2 = 0x00,
GPIOD1 = 0x00,
GPIO_const = 0x0C,
};
enum RESP1_bits {
RESP_DEMOD_EN1 = 0x80,
RESP_MOD_EN1 = 0x40,
RESP_PH2 = 0x00,
RESP_PH1 = 0x08,
RESP_PH0 = 0x00,
RESP_CTRL1 = 0x02,
RESP_CTRL0 = 0x00,
RESP1_const = 0x00,
RESP_PH_22_5 = 0x00,
RESP_PH_45 = RESP_PH0,
RESP_PH_67_5 = RESP_PH1,
RESP_PH_90 = (RESP_PH1 | RESP_PH0),
RESP_PH_112_5 = RESP_PH2,
RESP_PH_135 = (RESP_PH2 | RESP_PH0),
RESP_PH_157_5 = (RESP_PH2 | RESP_PH1),
RESP_NONE = 0x00,
RESP_EXT = RESP_CTRL0,
RESP_INT_SIG_INT = RESP_CTRL1,
RESP_INT_SIG_EXT = (RESP_CTRL1 | RESP_CTRL0)
};
enum RESP2_bits {
CALIB_ON = 0x00,
RESP_FREQ = 0x00,
RLDREF_INT = 0x02,
BIT0 = 0x01,
RESP2_const = 0x02,
};
// serial api
boolean read_ads_data = false;
boolean serial_send_data = false;
boolean valid_cmd = false;
enum SERIAL_API {
S_READ_ADS = 0x67,// = 0xBF, // read from the ads
S_STOP_READ_ADS = 0x73, // = 0xFD, // stop reading freom the ads
S_SEND_SERIAL = 0xDF, // start sending to the serial interface
S_STOP_SEND_SERIAL = 0xFB // stop streaming to the serial interface
};
//---------------------------------------------------------------------------------
// functions
//utilities
#include <stdarg.h>
String hex_to_char(int hex_in) {
int precision = 2;
char tmp[16];
char format[128];
sprintf(format, "0x%%.%dX", precision);
sprintf(tmp, format, hex_in);
//Serial.print(tmp);
return(String(tmp));
}
void write_byte(int reg_addr, int val_hex) {
//see pages 40,43 of datasheet -
digitalWrite(PIN_CS, LOW);
delayMicroseconds(5);
SPI.transfer(0x40 | reg_addr);
delayMicroseconds(5);
SPI.transfer(0x00); // number of registers to be read/written – 1
delayMicroseconds(5);
SPI.transfer(val_hex);
delayMicroseconds(10);
digitalWrite(PIN_CS, HIGH);
if(debug_msg){
Serial.println(sep);
Serial.print( "sent:\t" + hex_to_char(reg_addr) + "\t" + hex_to_char(val_hex) + "\t" );
Serial.println(val_hex, BIN);
}
}
int read_byte(int reg_addr){
int out = 0;
digitalWrite(PIN_CS, LOW);
SPI.transfer(0x20 | reg_addr);
delayMicroseconds(5);
SPI.transfer(0x00); // number of registers to be read/written – 1
delayMicroseconds(5);
out = SPI.transfer(0x00);
delayMicroseconds(1);
digitalWrite(PIN_CS, HIGH);
if(debug_msg){
Serial.println(sep);
Serial.println( "sent:\t" + hex_to_char(reg_addr) );
Serial.println( "recieved:\t" + hex_to_char(out) );
}
return(out);
}
void send_command(uint8_t cmd) {
digitalWrite(PIN_CS, LOW);
delayMicroseconds(5); // 5 = 6us at 32
SPI.transfer(cmd);
delayMicroseconds(10);
digitalWrite(PIN_CS, HIGH);
}
// initialization
void init_pins(){
//pinMode(SPICK, OUTPUT);
//pinMode(DIN, INPUT);
//pinMode(DOUT, OUTPUT);
pinMode(PIN_LED, OUTPUT);
pinMode(PIN_CS, OUTPUT);
pinMode(PIN_RESET, OUTPUT);
pinMode(PIN_START, OUTPUT);
pinMode(PIN_DRDY, INPUT);
digitalWrite(PIN_CS, HIGH);
digitalWrite(PIN_START, LOW);
delay(1);
}
void init_serial(){
Serial.begin(115200);
Serial.flush();
delayMicroseconds(100);
};
void init_spi(){
//SPI.setMOSI(DOUT);
//SPI.setMISO(DIN);
//SPI.setSCK(SPICK);
// initializes the SPI bus by setting SCK and MOSI low
SPI.begin();
// spi data mode
// sets clock polarity and phase
// CPOL = 0 (clock polarity, clock is idle when low)
// CPHA = 1 (clock phase , data is shifted in and out on the rising of the data clock signal )
SPI.setDataMode(SPI_MODE1);
// spi clock divider
// sets relative to the system clock
// n transitions per cycles (SPI_CLOCK_DIV2 = 1 transition / 2 cycles)
// DIV4 is arduino default, override to make faster
// needs to be at least 32, or the clock is too slow, 64 to be safe
SPI.setClockDivider(SPI_CLOCK_DIV16);
// spi bit order
// sets the order of the bits shifted in and out
// MSBFIRST = most-significant bit first
SPI.setBitOrder(MSBFIRST);
// Pause
delay(1);
};
void init_ads(){
int chSet;
// see page 77 for boot sequence
// Issue Reset Pulse
digitalWrite(PIN_RESET, HIGH);
delay(1000);
digitalWrite(PIN_RESET, LOW);
delay(1000);
digitalWrite(PIN_RESET, HIGH);
delay(100);
// Reset communication
digitalWrite(PIN_CS, LOW);
delay(1000);
digitalWrite(PIN_CS, HIGH);
// Wait longer for TI chip to start
delay(500);
// Send SDATAC Command (Stop Read Data Continuously mode)
send_command(SDATAC);
delay(10);
chSet = read_byte(READ | ID);
Serial.print("-- ID" + String(chSet) + "--");
// All GPIO set to output 0x0000: (floating CMOS inputs can flicker on and off, creating noise)
write_byte(GPIO,0x00);
if(debug_msg){
Serial.println(sep);
Serial.println("CONFIGs 1 2");
}
write_byte(CONFIG1, SAMP_500_SPS);
write_byte(CONFIG2, 0xA0);
delay(1000);
//write_byte(CONFIG2, 0xA3); //Actives test signal. Comment this line for normal electrodes
if(debug_msg){
Serial.println(sep);
Serial.println("Check Configs");
chSet = read_byte(CONFIG1);
Serial.println("CONFIG1: " + String(chSet) + "\t\t" + hex_to_char(chSet) );
chSet = read_byte(CONFIG2);
Serial.println("CONFIG2: " + String(chSet) + "\t\t" + hex_to_char(chSet) );
}
if(debug_msg){
Serial.println(sep);
Serial.println("Set Channels");
}
// Set channels to input signal
for (int i = 1; i <= gMaxChan; ++i) {
write_byte(CHnSET + i, ELECTRODE_INPUT | GAIN_12X);
write_byte(CHnSET + i, 0x00); //For test signal 0x05. For normal electrodes 0x00
write_byte(CHnSET + i,SHORTED);
}
// Start
digitalWrite(PIN_START, HIGH);
delay(150);
// get device id
//detect active channels
if(debug_msg){
Serial.println(sep);
Serial.println("detecting active channels:");
}
//gNumActiveChan = 0;
for (int i = 1; i <= gMaxChan; i++) {
delayMicroseconds(1);
chSet = read_byte(CHnSET + i);
gActiveChan[i] = ((chSet & 7) != SHORTED); // SHORTED = 0x01
if ( (chSet & 7) != SHORTED) gNumActiveChan++;
if(debug_msg) Serial.println(String(i) + ": " + String(chSet) + "\t\t" + hex_to_char(chSet) );
}
if(debug_msg) Serial.println("detected " + String(gNumActiveChan) + " active channels.");
// start reading
//send_command(RDATAC); // can't read registers when in rdatac mode!
}
// get data
void read_and_send_data(){
//Serial.println(sep);
//vars
int numSerialBytes = 1 + (3 * gNumActiveChan); //8-bits header plus 24-bits per ACTIVE channel
unsigned char serialBytes[numSerialBytes];
int i = 0;
int values[gNumActiveChan];
unsigned int a, b, c;
// start
digitalWrite(PIN_CS, LOW);
delayMicroseconds(1);
//Serial.println("RD");
SPI.transfer(RDATAC);
delayMicroseconds(1);
// get bytes 1-3
serialBytes[i++] = SPI.transfer(0x00); // get 1st byte of header
//delayMicroseconds(1);
SPI.transfer(0x00); //skip 2nd byte of header
//delayMicroseconds(1);
SPI.transfer(0x00); //skip 3rd byte of header
delayMicroseconds(1);
// get channels
for (int ch = 1; ch <= gMaxChan; ch++) {
a = SPI.transfer(0x00);
//delayMicroseconds(1);
b = SPI.transfer(0x00);
//delayMicroseconds(1);
c = SPI.transfer(0x00);
//delayMicroseconds(1);
if (gActiveChan[ch]) {
// save 3 bytes per active channel
serialBytes[i++] = a;
serialBytes[i++] = b;
serialBytes[i++] = c;
}
if(serial_send_data){ //Here we send the data. Now it only send channel 1 (ch == 1)
//if(ch < gMaxChan){
if(ch == 1){
//Serial.println("-Channel " + String(ch));
Serial.print( String(a) + " " + String(b) + " " + String(c) + "\n");
}
}
}
// end
delayMicroseconds(1);
//delay(1);
digitalWrite(PIN_CS, HIGH);
}
void serial_api_get(){
// send data only when you receive data:
if (Serial.available() > 0) {
int serial_in = Serial.read(); // read the incoming byte:
// process api
if(serial_in == S_READ_ADS ) {read_ads_data = true; valid_cmd = true;Serial.println("start reading --> "); Serial.println(serial_in); Serial.println(" <--");}
if(serial_in == S_STOP_READ_ADS ) {read_ads_data = false; valid_cmd = true;Serial.println("stop reading --> "); Serial.println(serial_in); Serial.println(" <--");}
if(serial_in == S_SEND_SERIAL ) {serial_send_data = true; digitalWrite(PIN_LED, HIGH); valid_cmd = true; }
if(serial_in == S_STOP_SEND_SERIAL ) {serial_send_data = false; digitalWrite(PIN_LED, LOW); valid_cmd = true; }
else if (valid_cmd == false) Serial.println("Invalid Command --> "); Serial.println(serial_in); Serial.println(" <--");
valid_cmd == false;
}
}
void serial_api_use(){
if(read_ads_data){
if (digitalRead(PIN_DRDY) == LOW) {
read_and_send_data(); //only read when data is ready, sending data across serial is in this function!
}
}
};
// main
void setup(){
// ------------------------------------------------------------
// init
delay(1000);
// set pins
init_pins();
// serial
init_serial();
// on!
if(debug_msg) Serial.println("on");
digitalWrite(PIN_LED, HIGH);
// spi
init_spi();
// ads
init_ads();
// ------------------------------------------------------------
// do stuff
// ------------------------------------------------------------
// exit
// off!
digitalWrite(PIN_LED, LOW);
if(debug_msg) Serial.println("off");
//blinkyblink();
}
void loop() {
serial_api_get();
serial_api_use();
}
This is my output in MPIDE software
- Whether my program and output is correct?
- I set config 2 for A8 but iam getting A0 in output shown above
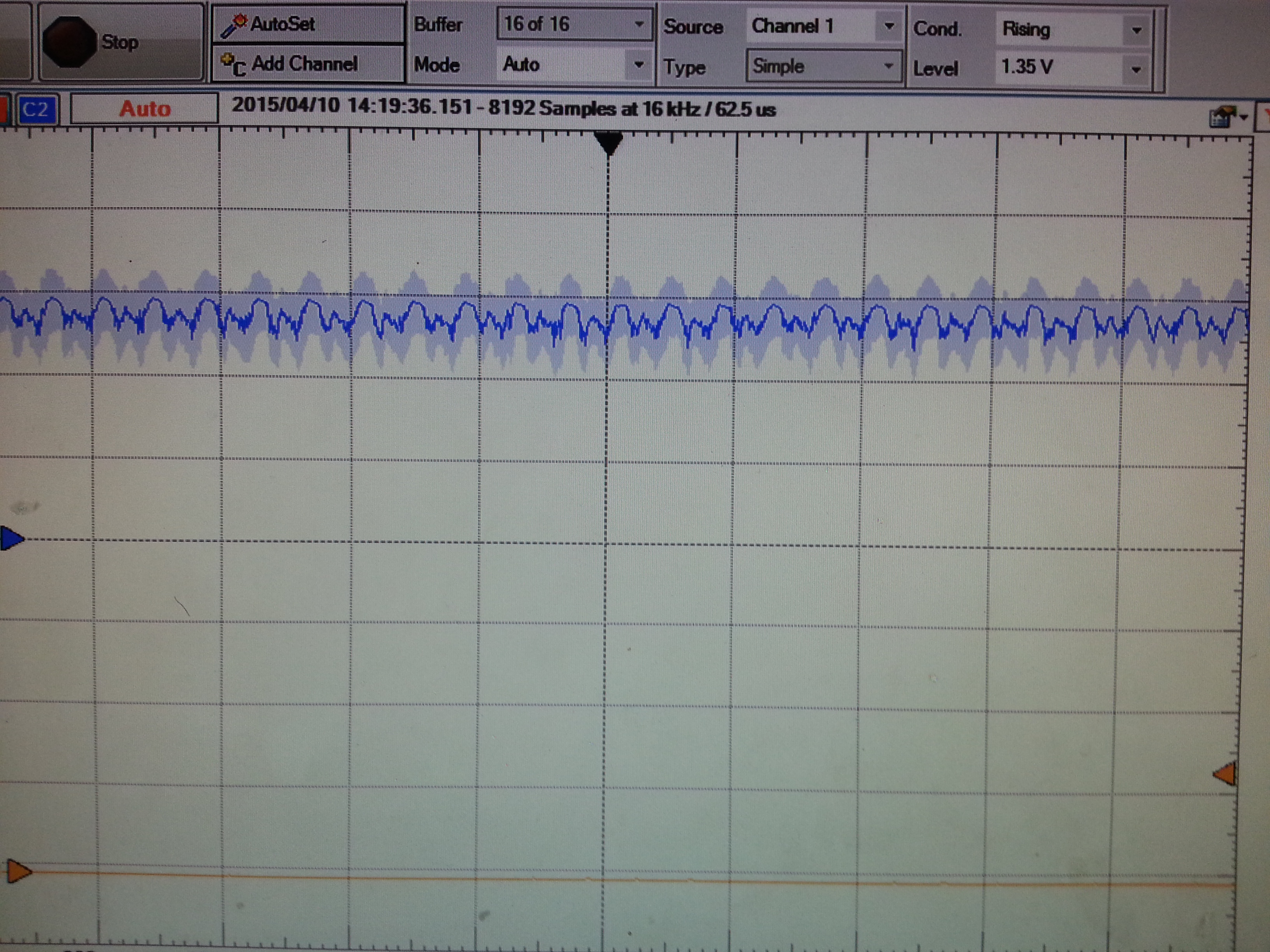
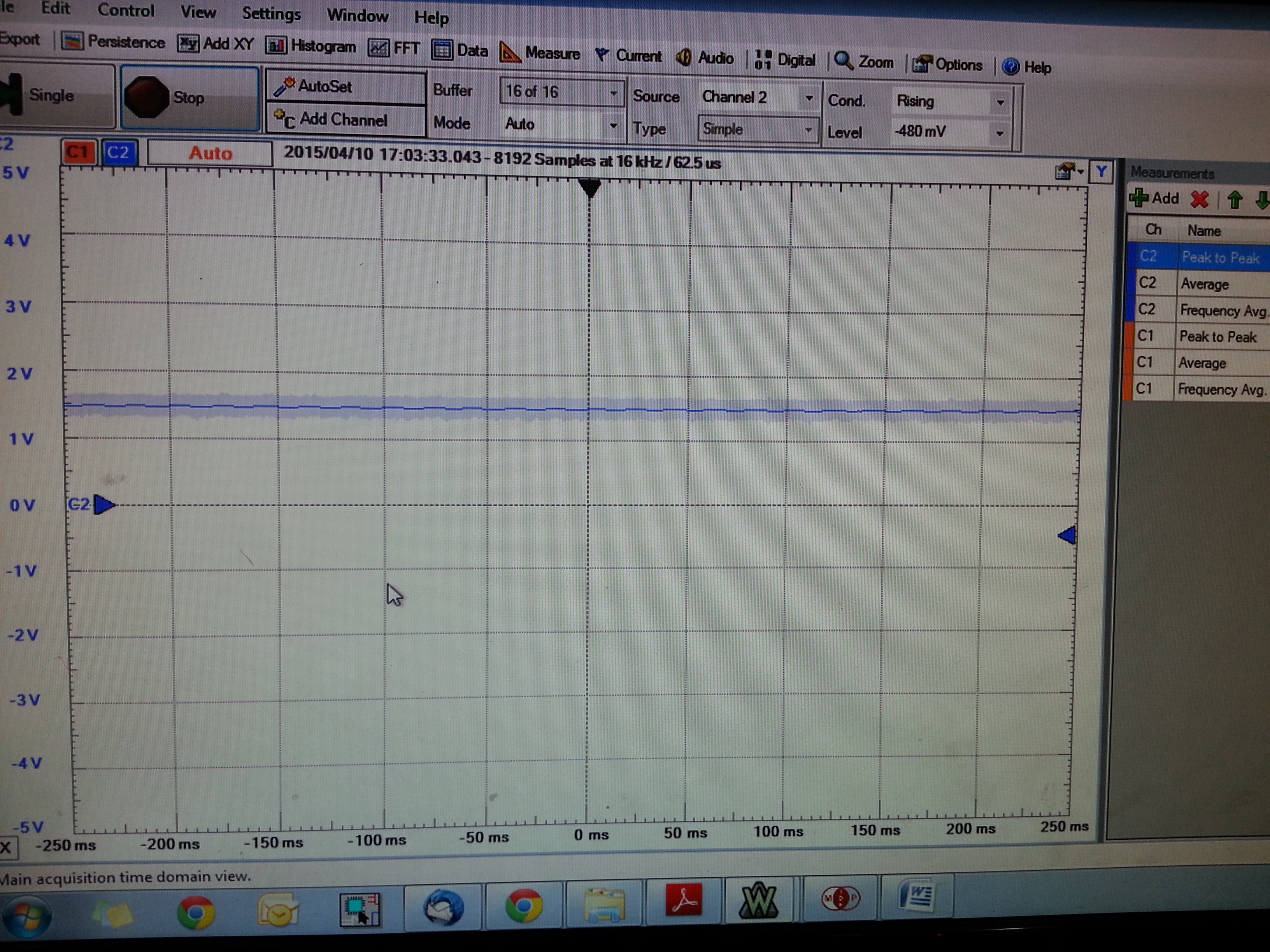
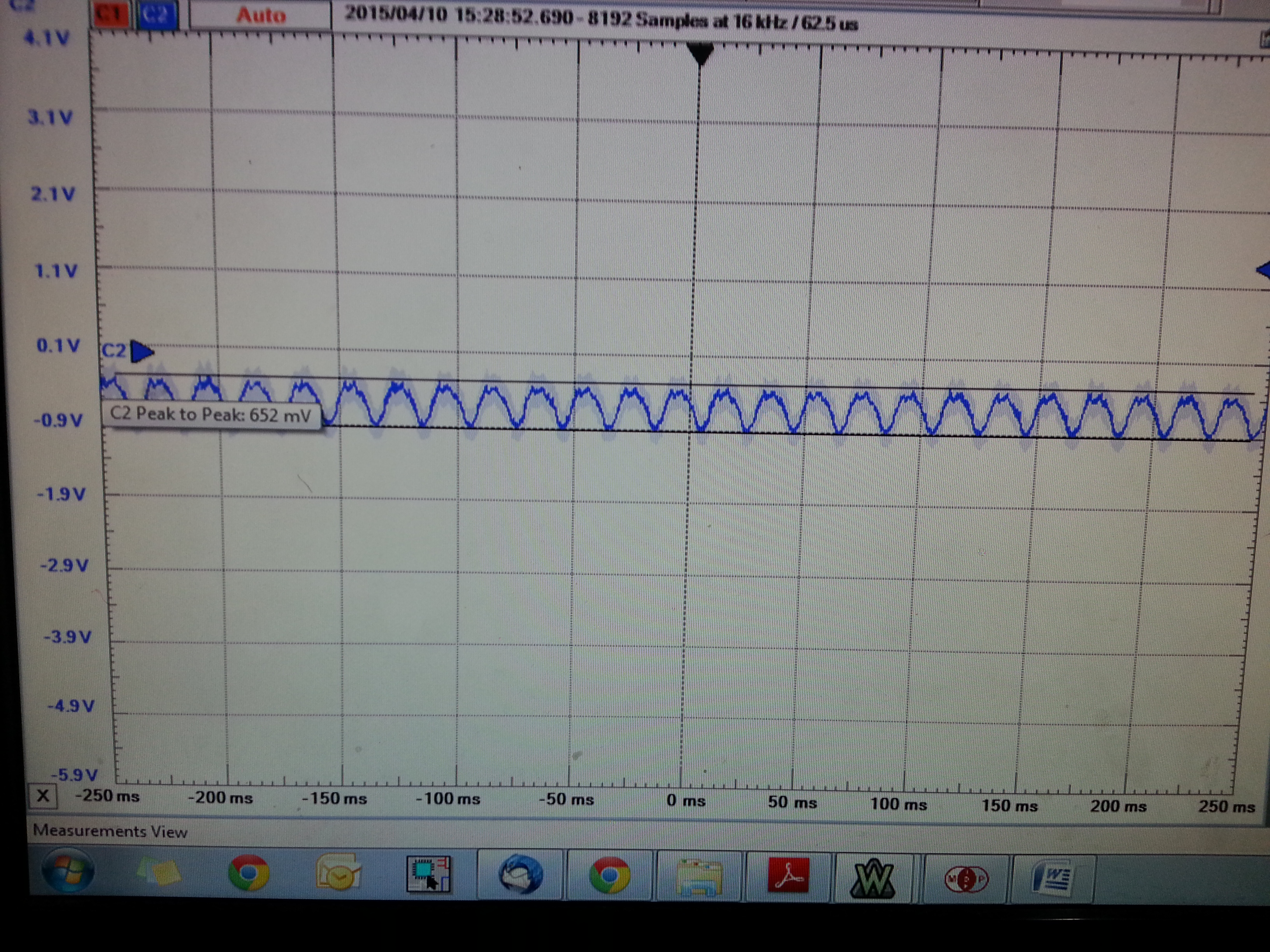
- iam getting waveforms only when switch is pressed but i have written in program for RDATAC continuous mode. Please reply me how can i change my program so that i get respiration output continuously???
- whether this chip gives only digital output?? how can i change this output to analog and view my respiration waveform continuosly using LABVIEW DAQ?? what should i do for it in addition??
- How many electrodes i need to use for it?? and where i should place the electrodes??
- From which pin i need to take output??
waiting for response
Thanks in advanceecg_schematic.pdf2.pdf