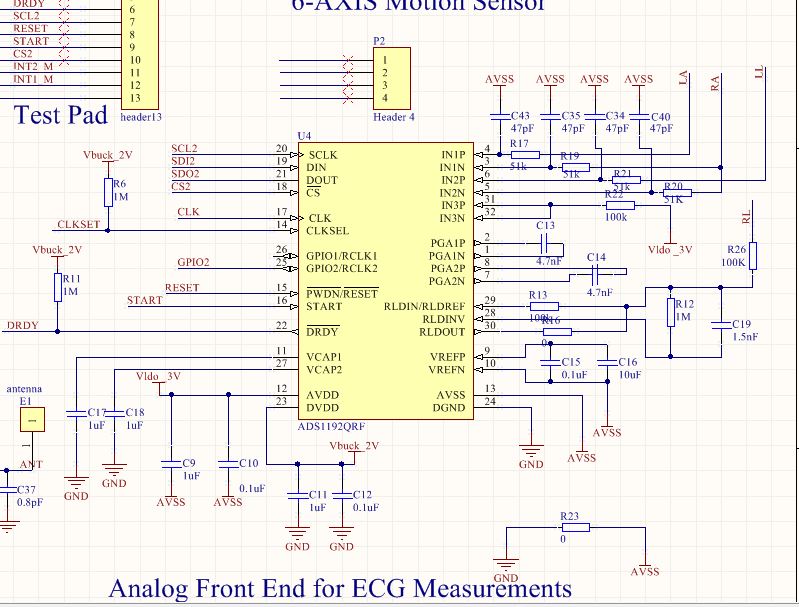
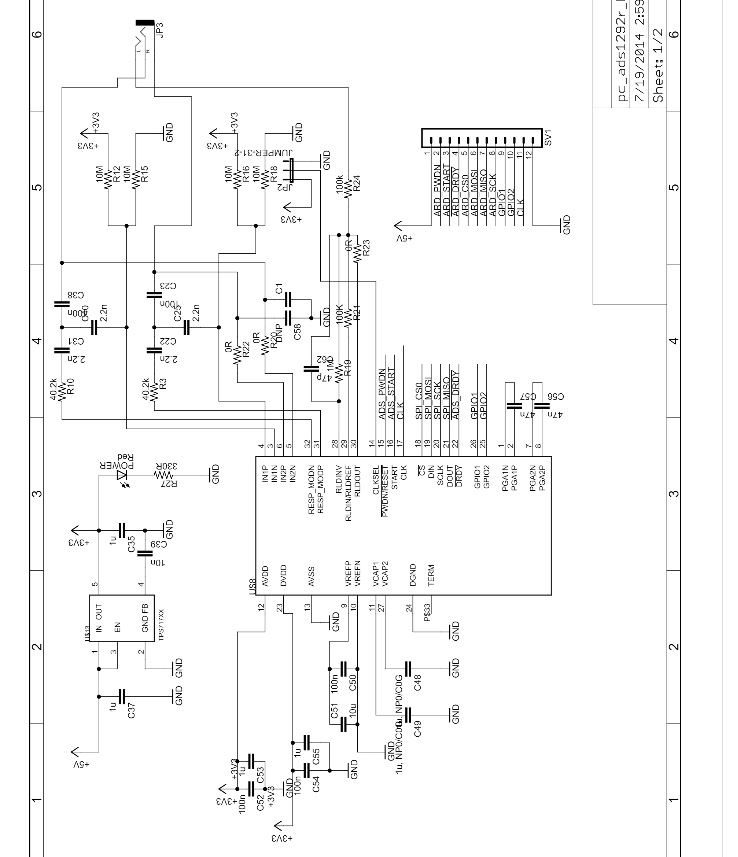
i use nrf52 DK as master and configure ads1292 breakout as slave. . I write the sample spi code to read the value of the specific register in the ads1292. what happen is that the CS ,SCL,MOSI signal are all correct, but the MISO signal is always wrong.
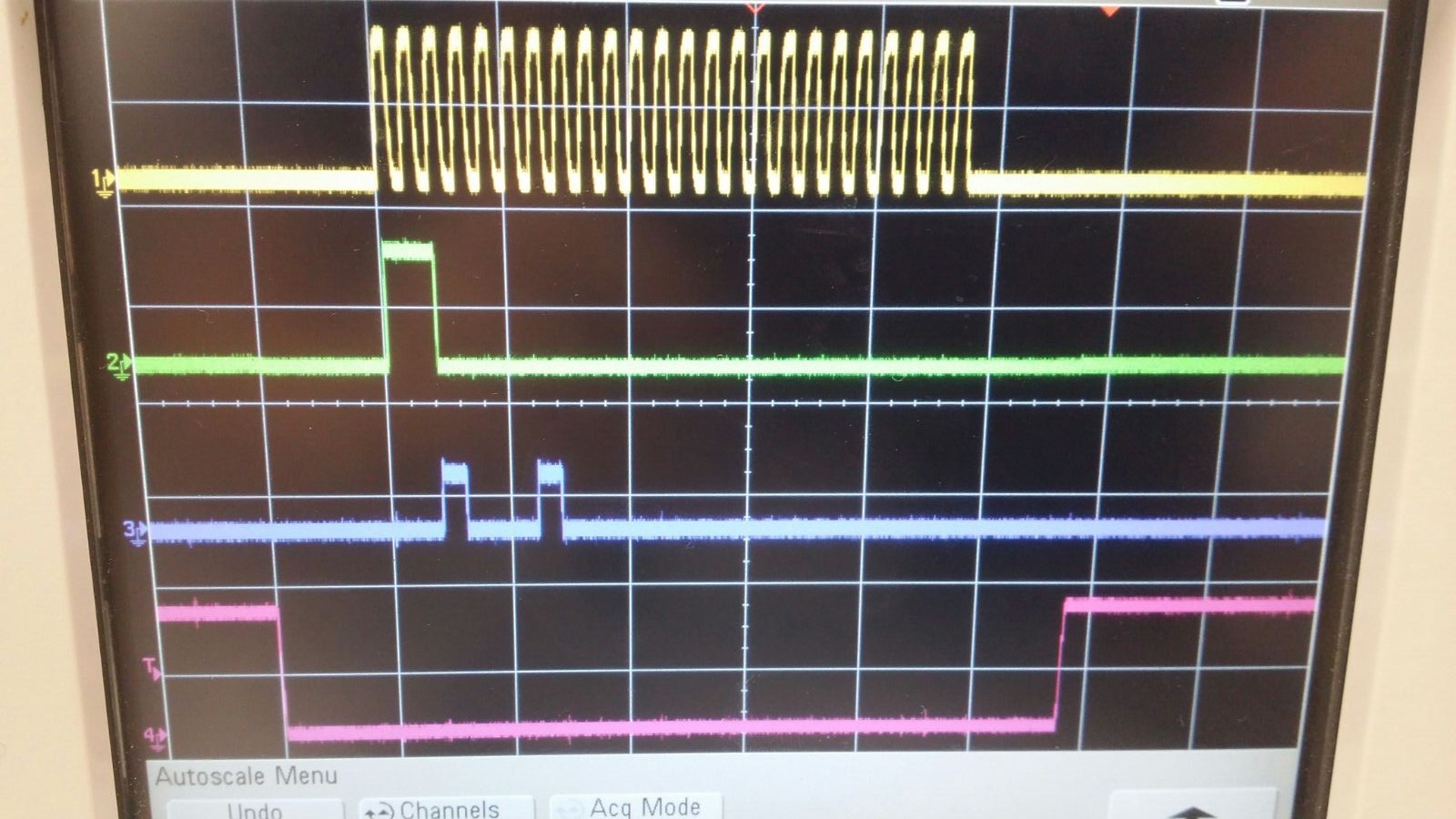
yellow color is sclk,green color is miso, blue one is mosi,pink one is cs. no matter what register i read, the green signal (miso)is always like that. I attached my code as follow。
#include <stdio.h>
#include <stdbool.h>
#include "app_error.h"
#include "app_util_platform.h"
#include "nrf_delay.h"
#include "bsp.h"
#include "app_timer.h"
#include "nrf_drv_spi.h"
#include "nordic_common.h"
#include "nrf_drv_gpiote.h"
#define WRITE_BIT 0x40
#define READ_BIT 0x20
#define APP_TIMER_PRESCALER 0 /**< Value of the RTC1 PRESCALER register. */
#define APP_TIMER_MAX_TIMERS BSP_APP_TIMERS_NUMBER /**< Maximum number of simultaneously created timers. */
#define APP_TIMER_OP_QUEUE_SIZE 2 /**< Size of timer operation queues. */
#define DELAY_MS 1000 /**< Timer Delay in milli-seconds. */
#define TX_RX_BUF_LENGTH 2 /**< SPI transaction buffer length. */
#if (SPI0_ENABLED == 1)
static const nrf_drv_spi_t m_spi_master = NRF_DRV_SPI_INSTANCE(0);
#elif (SPI1_ENABLED == 1)
static const nrf_drv_spi_t m_spi_master = NRF_DRV_SPI_INSTANCE(1);
#elif (SPI2_ENABLED == 1)
static const nrf_drv_spi_t m_spi_master = NRF_DRV_SPI_INSTANCE(2);
#else
#error "No SPI enabled."
#endif
// Data buffers.
static uint8_t m_tx_data[TX_RX_BUF_LENGTH] = {0}; /**< A buffer with data to transfer. */
static uint8_t m_rx_data[TX_RX_BUF_LENGTH] = {0}; /**< A buffer for incoming data. */
static volatile bool m_transfer_completed = true; /**< A flag to inform about completed transfer. */
void app_error_handler(uint32_t error_code, uint32_t line_num, const uint8_t * p_file_name)
{
UNUSED_VARIABLE(bsp_indication_set(BSP_INDICATE_FATAL_ERROR));
for (;;)
{
// No implementation needed.
}
}
static void spi_master_event_handler(nrf_drv_spi_event_t event)
{
uint32_t err_code = NRF_SUCCESS;
// bool result = false;
switch (event)
{
case NRF_DRV_SPI_EVENT_DONE:
// Check if data are valid.
// result = buf_check(m_rx_data, TX_RX_BUF_LENGTH);
// APP_ERROR_CHECK_BOOL(result);
err_code = bsp_indication_set(BSP_INDICATE_RCV_OK);
APP_ERROR_CHECK(err_code);
// Inform application that transfer is completed.
m_transfer_completed = true;
break;
default:
// No implementation needed.
break;
}
}
static void spi_send_recv(uint8_t * const p_tx_data,
uint8_t * const p_rx_data,
const uint16_t len)
{
// Initalize buffers.
// init_buffers(p_tx_data, p_rx_data, len);
// Start transfer.
uint32_t err_code = nrf_drv_spi_transfer(&m_spi_master,
p_tx_data, len, p_rx_data, len);
APP_ERROR_CHECK(err_code);
nrf_delay_ms(10);
}
void bsp_configuration()
{
uint32_t err_code = NRF_SUCCESS;
NRF_CLOCK->LFCLKSRC = (CLOCK_LFCLKSRC_SRC_Xtal << CLOCK_LFCLKSRC_SRC_Pos);
NRF_CLOCK->EVENTS_LFCLKSTARTED = 0;
NRF_CLOCK->TASKS_LFCLKSTART = 1;
while (NRF_CLOCK->EVENTS_LFCLKSTARTED == 0)
{
// Do nothing.
}
APP_TIMER_INIT(APP_TIMER_PRESCALER, APP_TIMER_MAX_TIMERS, APP_TIMER_OP_QUEUE_SIZE, NULL);
err_code = bsp_init(BSP_INIT_LED, APP_TIMER_TICKS(100, APP_TIMER_PRESCALER), NULL);
APP_ERROR_CHECK(err_code);
}
//-----------------------------spi functions----------------------------------
void SPIWriteReg(uint8_t addr, uint8_t value)
{
uint8_t temp[2];
uint8_t temp_rec[2]={0};
temp[0] = addr | WRITE_BIT;
temp[1] = value;
//nrf_drv_gpiote_out_clear(22);
spi_send_recv(temp, temp_rec, 2);
if (m_transfer_completed){
m_transfer_completed=false;
nrf_delay_ms(1);
//nrf_drv_gpiote_out_set(22);
}
nrf_delay_ms(1);
}
uint8_t SPIReadReg(uint8_t addr)
{
uint8_t temp[3];
uint8_t temp_rec[3]={0};
temp[0] = addr | READ_BIT ;
temp[1] = 0x00;
temp[2] = 0x00;
//nrf_drv_gpiote_out_clear(22);
spi_send_recv(temp, temp_rec, 3);
if (m_transfer_completed){
// printf("read_finally\n");
m_transfer_completed=false;
nrf_delay_ms(1);
// nrf_drv_gpiote_out_set(22);
}
nrf_delay_ms(1);
return temp_rec[2];
}
void Disablestart()
{
nrf_drv_gpiote_out_clear(28);
nrf_delay_ms(1);
}
void Enablestart()
{
nrf_drv_gpiote_out_set(28);
nrf_delay_ms(1);
}
void reset()
{
nrf_drv_gpiote_out_set(29);
nrf_delay_ms(10);
nrf_drv_gpiote_out_clear(29);
nrf_delay_ms(10);
nrf_drv_gpiote_out_set(29);
nrf_delay_ms(10);
}
int main(void)
{
uint8_t aa=0x01;
// nrf_gpio_cfg_output(30); //DRDY
// nrf_gpio_cfg_output(29); //PWDN
// nrf_gpio_cfg_output(28); //START
// nrf_drv_gpiote_out_set(22); //This should assert the CS for the SPI peripheral
//nrf_delay_ms(1);
// Setup bsp module.
bsp_configuration();
nrf_drv_spi_config_t const config =
{
#if (SPI0_ENABLED == 1)
.sck_pin = SPIM0_SCK_PIN,
.mosi_pin = SPIM0_MOSI_PIN,
.miso_pin = SPIM0_MISO_PIN,
.ss_pin = SPIM0_SS_PIN,
#elif (SPI1_ENABLED == 1)
.sck_pin = SPIM1_SCK_PIN,
.mosi_pin = SPIM1_MOSI_PIN,
.miso_pin = SPIM1_MISO_PIN,
.ss_pin = SPIM1_SS_PIN,
#elif (SPI2_ENABLED == 1)
.sck_pin = SPIM2_SCK_PIN,
.mosi_pin = SPIM2_MOSI_PIN,
.miso_pin = SPIM2_MISO_PIN,
.ss_pin = SPIM2_SS_PIN,
#endif
.irq_priority = APP_IRQ_PRIORITY_LOW,
.orc = 0xCC,
.frequency = NRF_DRV_SPI_FREQ_1M,
.mode = NRF_DRV_SPI_MODE_1,
.bit_order = NRF_DRV_SPI_BIT_ORDER_MSB_FIRST,
};
ret_code_t err_code = nrf_drv_spi_init(&m_spi_master, &config, spi_master_event_handler);
APP_ERROR_CHECK(err_code);
//SPIWriteReg(0x02,0x11);
while(1)
{
aa=SPIReadReg(0x02);
}
}