Hi,
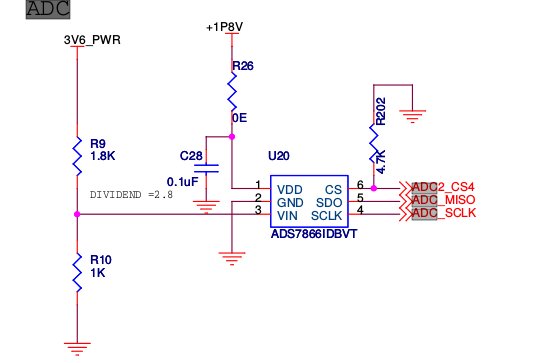
We have got ads7866 idbvt adc which we have connected to freescale's imx6Q processor through SPI. Now we are trying to get voltage(analog) value and display it. But it is giving Result is: 0 when we have connected 3.6V to respective Vin. Why is this so????? Please find our programs as attached
####ads7866Spi.h
#ifndef ADS7866SPI_H
#define ADS7866SPI_H
#include <unistd.h>
#include <stdint.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <linux/spi/spidev.h>
#include <stdio.h>
#include <errno.h>
#include <stdlib.h>
#include <string>
#include <iostream>
class ads7866Spi{
public:
ads7866Spi();
ads7866Spi(std::string devspi, unsigned char spiMode, unsigned int spiSpeed, unsigned char spibitsPerWord);
~ads7866Spi();
int spiWriteRead( unsigned char *data, int length);
private:
unsigned char mode;
unsigned char bitsPerWord;
unsigned int speed;
int spifd;
int spiOpen(std::string devspi);
int spiClose();
};
#endif
###ads7866Spi.c
#include "ads7866Spi.h"
using namespace std;
/**********************************************************
* spiOpen() :function is called by the constructor.
* It is responsible for opening the spidev device
* "devspi" and then setting up the spidev interface.
* private member variables are used to configure spidev.
* They must be set appropriately by constructor before calling
* this function.
* *********************************************************/
int ads7866Spi::spiOpen(std::string devspi){
int statusVal = -1;
this->spifd = open(devspi.c_str(), O_RDWR);
if(this->spifd < 0){
perror("could not open SPI device");
exit(1);
}
statusVal = ioctl (this->spifd, SPI_IOC_WR_MODE, &(this->mode));
if(statusVal < 0){
perror("Could not set SPIMode (WR)...ioctl fail");
exit(1);
}
statusVal = ioctl (this->spifd, SPI_IOC_RD_MODE, &(this->mode));
if(statusVal < 0) {
perror("Could not set SPIMode (RD)...ioctl fail");
exit(1);
}
statusVal = ioctl (this->spifd, SPI_IOC_WR_BITS_PER_WORD, &(this->bitsPerWord));
if(statusVal < 0) {
perror("Could not set SPI bitsPerWord (WR)...ioctl fail");
exit(1);
}
statusVal = ioctl (this->spifd, SPI_IOC_RD_BITS_PER_WORD, &(this->bitsPerWord));
if(statusVal < 0) {
perror("Could not set SPI bitsPerWord(RD)...ioctl fail");
exit(1);
}
statusVal = ioctl (this->spifd, SPI_IOC_WR_MAX_SPEED_HZ, &(this->speed));
if(statusVal < 0) {
perror("Could not set SPI speed (WR)...ioctl fail");
exit(1);
}
statusVal = ioctl (this->spifd, SPI_IOC_RD_MAX_SPEED_HZ, &(this->speed));
if(statusVal < 0) {
perror("Could not set SPI speed (RD)...ioctl fail");
exit(1);
}
return statusVal;
}
/***********************************************************
* spiClose(): Responsible for closing the spidev interface.
* Called in destructor
* *********************************************************/
int ads7866Spi::spiClose(){
int statusVal = -1;
statusVal = close(this->spifd);
if(statusVal < 0) {
perror("Could not close SPI device");
exit(1);
}
return statusVal;
}
/********************************************************************
* This function writes data "data" of length "length" to the spidev
* device. Data shifted in from the spidev device is saved back into
* "data".
* ******************************************************************/
int ads7866Spi::spiWriteRead( unsigned char *data, int length){
struct spi_ioc_transfer spi[length];
int i = 0;
int retVal = -1;
// one spi transfer for each byte
for (i = 0 ; i < length ; i++){
spi[i].tx_buf = (unsigned long)(data + i); // transmit from "data"
spi[i].rx_buf = (unsigned long)(data + i) ; // receive into "data"
spi[i].len = sizeof(*(data + i)) ;
spi[i].delay_usecs = 0 ;
spi[i].speed_hz = this->speed ;
spi[i].bits_per_word = this->bitsPerWord ;
spi[i].cs_change = 0;
}
retVal = ioctl (this->spifd, SPI_IOC_MESSAGE(length), &spi) ;
if(retVal < 0){
perror("Problem transmitting spi data..ioctl");
exit(1);
}
return retVal;
}
/*************************************************
* Default constructor. Set member variables to
* default values and then call spiOpen()
* ***********************************************/
ads7866Spi::ads7866Spi(){
this->mode = SPI_MODE_0 ;
this->bitsPerWord = 8;
this->speed = 1000000;
this->spifd = -1;
this->spiOpen(std::string("/dev/spidev2.0"));
}
/*************************************************
* overloaded constructor. let user set member variables to
* and then call spiOpen()
* ***********************************************/
ads7866Spi::ads7866Spi(std::string devspi, unsigned char spiMode, unsigned int spiSpeed, unsigned char spibitsPerWord){
this->mode = spiMode ;
this->bitsPerWord = spibitsPerWord;
this->speed = spiSpeed;
this->spifd = -1;
this->spiOpen(devspi);
}
/**********************************************
* Destructor: calls spiClose()
* ********************************************/
ads7866Spi::~ads7866Spi(){
this->spiClose();
}
###main.c
#include "ads7866Spi.h"
using namespace std;
int main(void)
{
ads7866Spi a2d("/dev/spidev2.0", SPI_MODE_0, 1000000, 8);
int i = 20;
int a2dVal = 0;
int a2dChannel = 0;
unsigned char data[3];
while(i > 0)
{
data[0] = 1; // first byte transmitted -> start bit
data[1] = 0b10000000 |( ((a2dChannel & 7) << 4)); // second byte transmitted -> (SGL/DIF = 1, D2=D1=D0=0)
data[2] = 0; // third byte transmitted....don't care
a2d.spiWriteRead(data, sizeof(data) );
a2dVal = 0;
a2dVal = (data[1]<< 8) & 0b1100000000; //merge data[1] & data[2] to get result
a2dVal |= (data[2] & 0xff);
sleep(1);
cout << "The Result is: " << a2dVal << endl;
i--;
}
return 0;
}
CC = g++
INCLUDES = -I ../..
all:
$(CC) $(INCLUDES) ads7866SpiTest.cpp ads7866Spi.cpp -o ads7866SpiTest
clean:
rm ads7866SpiTest