


Hi Joachim,
I need also to connect four 3-wires RTD to a MCU. There are many application notes to connect one 3-wire RTD but
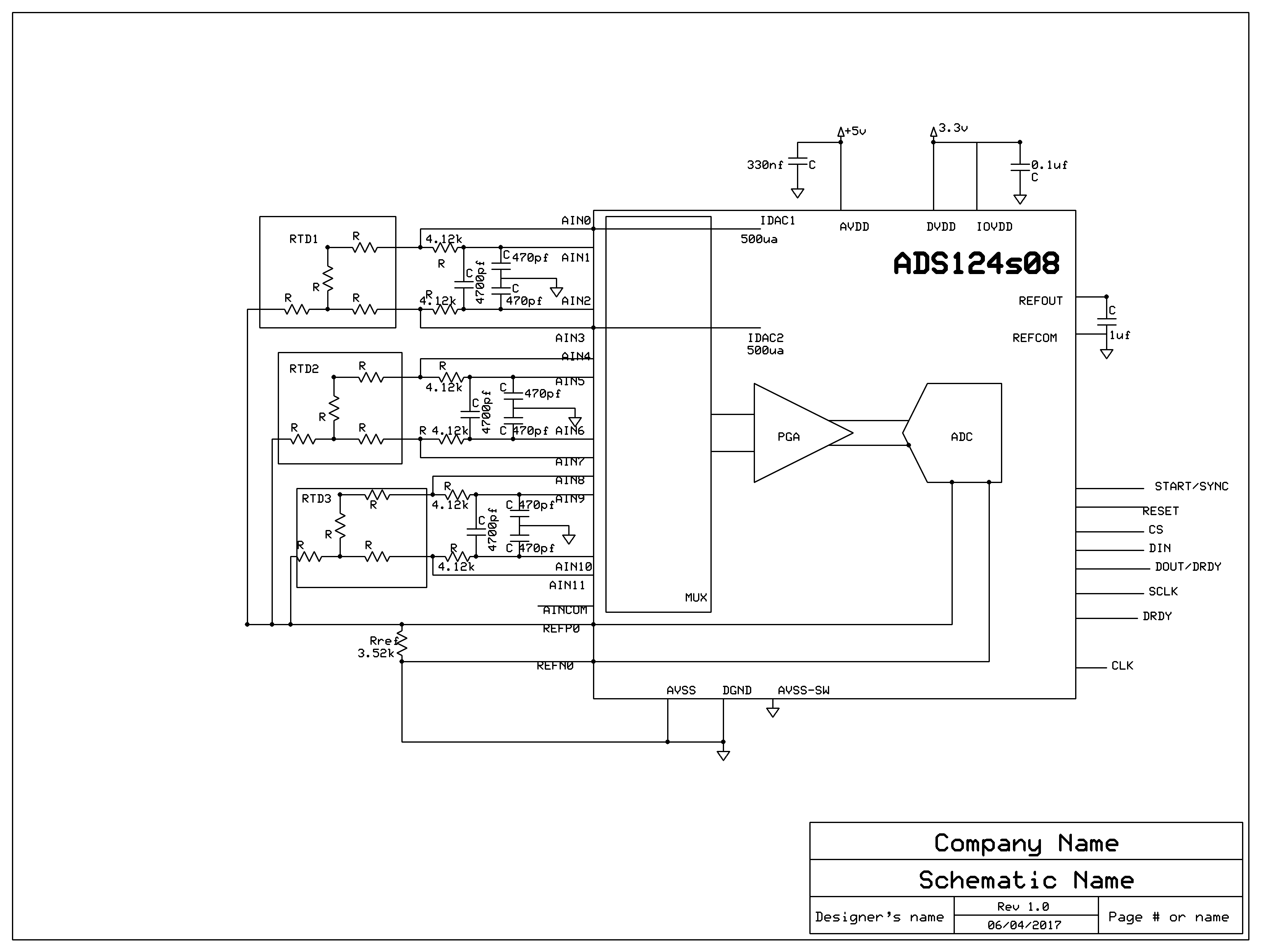
I cannot find any schematic drawing about multiple RTDs connection.
You said "There are many ways how multiple RTD measurements can be implemented with one of our ADCs."
What is the best and more reliable and precise way ? Which ADC can suit exactly this need without additional circuitry
or additional software calculation (like 2 measurements and substraction as you explained with ADS124S08) ?
Which schematic and products do you recommend:
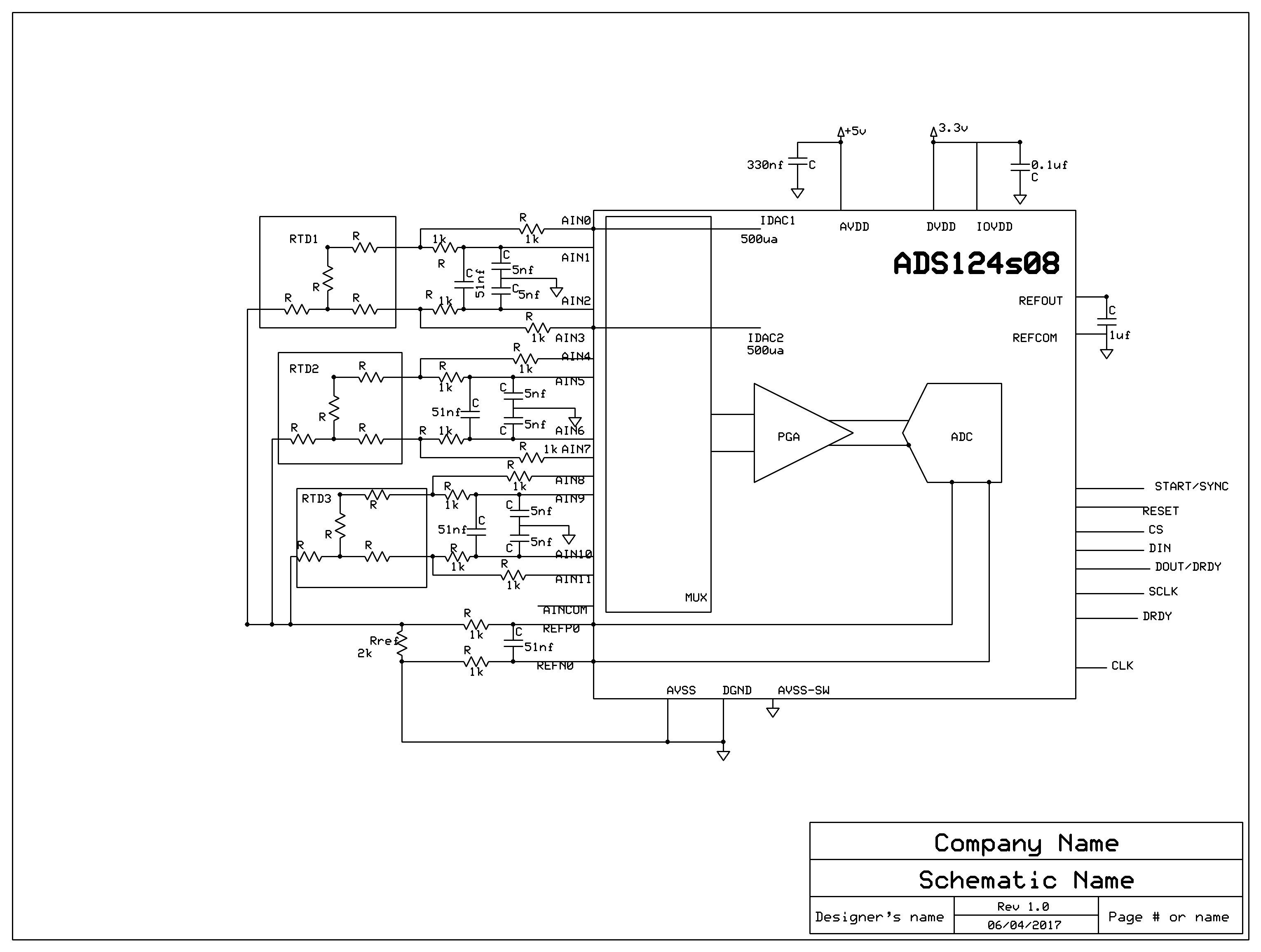
1) ADC with only one RTD connected at a given time and MUXs between ADC and MCU or
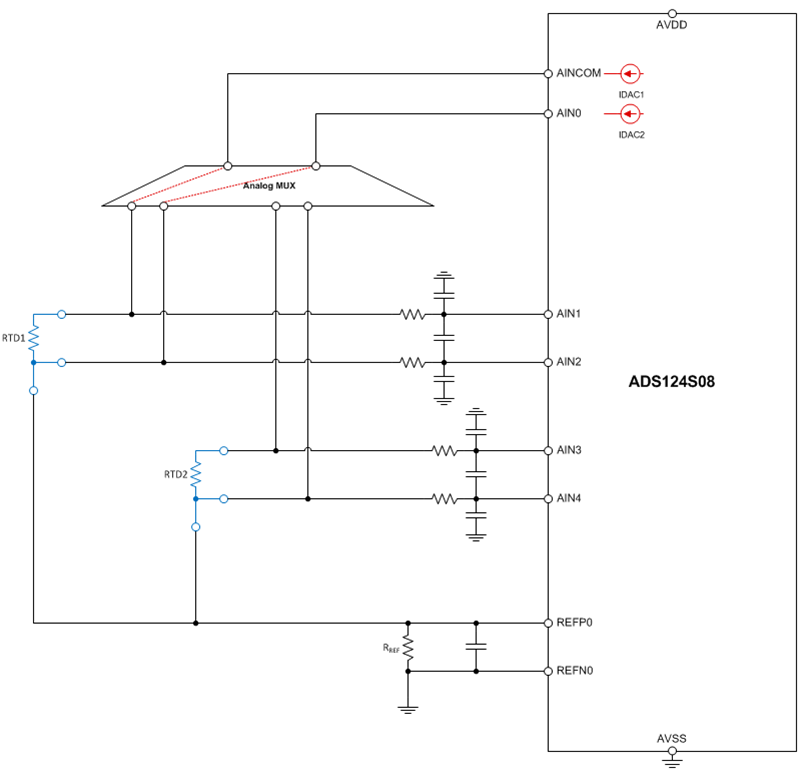
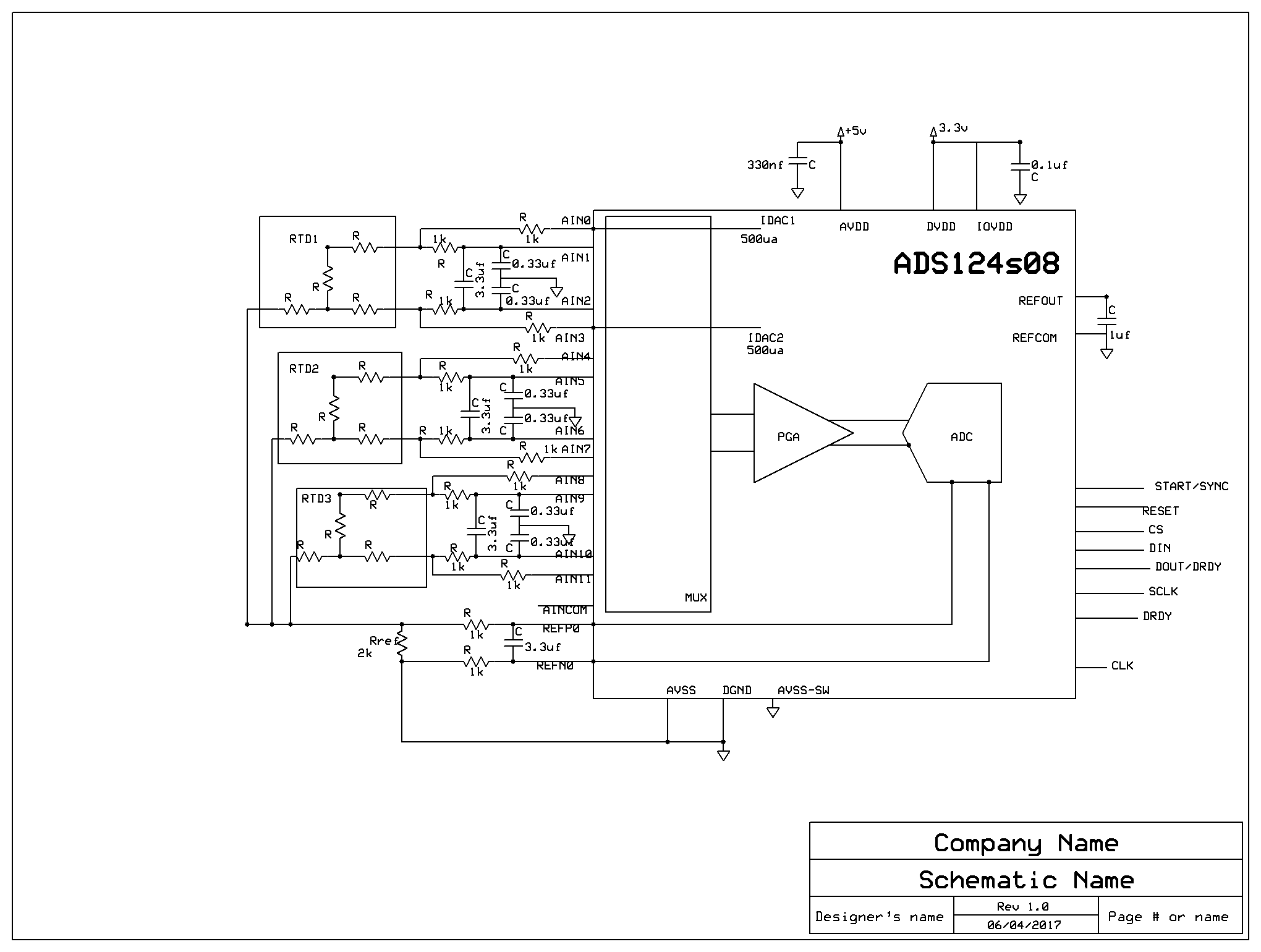
2) ADC allowing to directly connect four RTDs ?
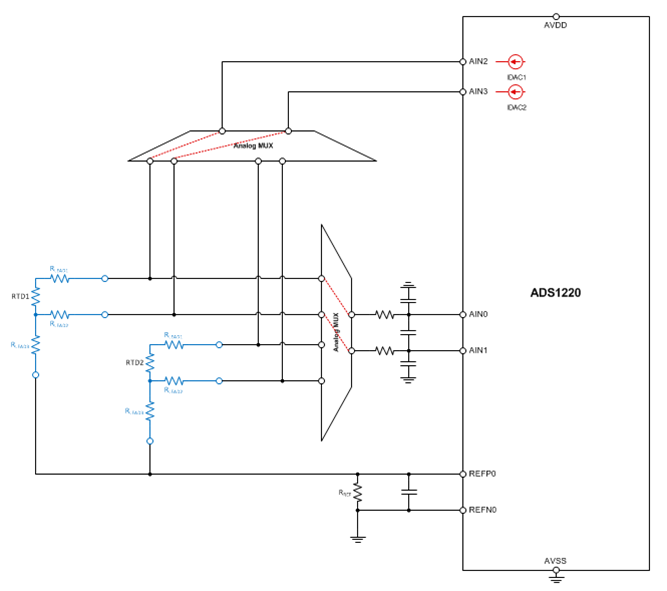
3) a mix of these 2 solutions, for instance ADC with 2 RTDs and a MUX to switch 2/2 RTDs
Can you indicate pros and cons of these 2 extreme solutions ?
Thanks a lot in advance for your advice.











{kind=link}