Hi~
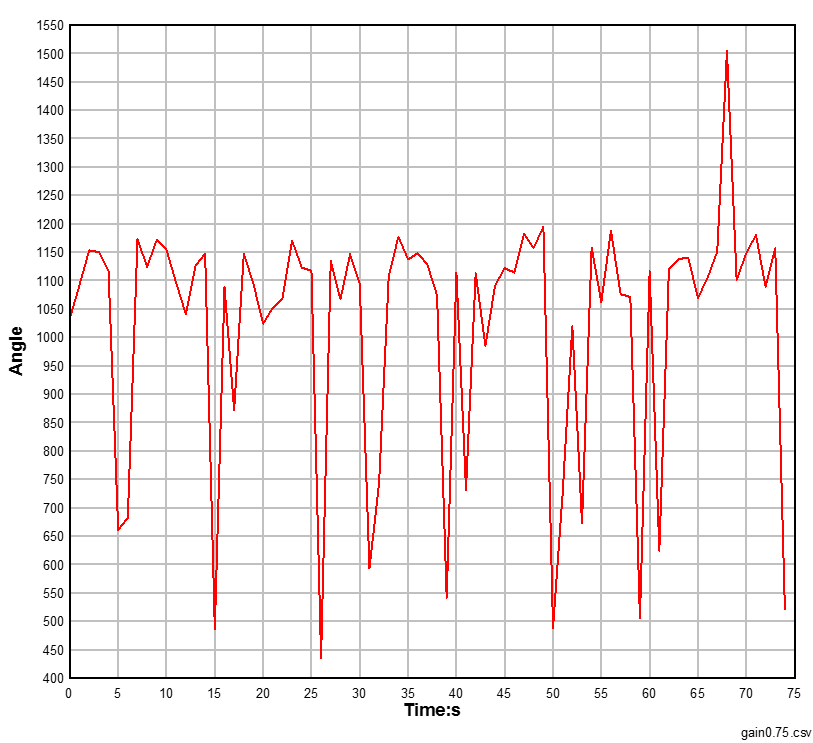
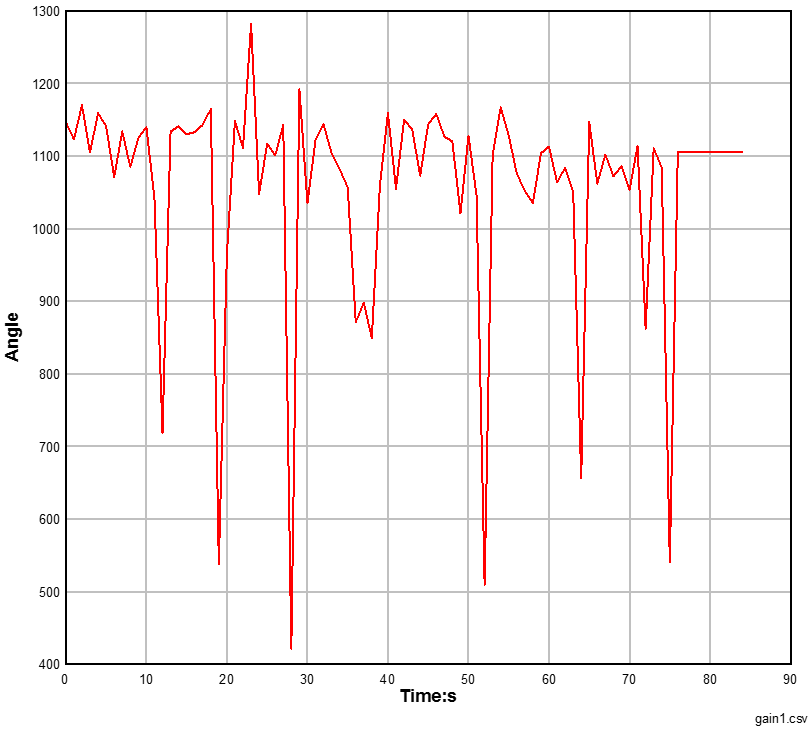
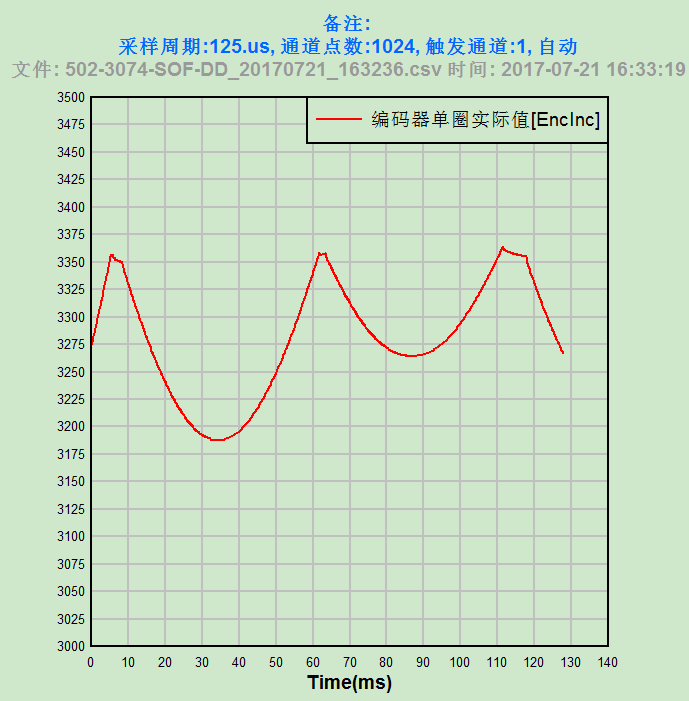
(1)When the motor is in a fixed position (which is always in sinθ = 0 or cosθ = 0), the angle values which are stored in DEV_STAT5 register are always changing from 2 to 170 incs.Please see the graph below, What's the reason for that?
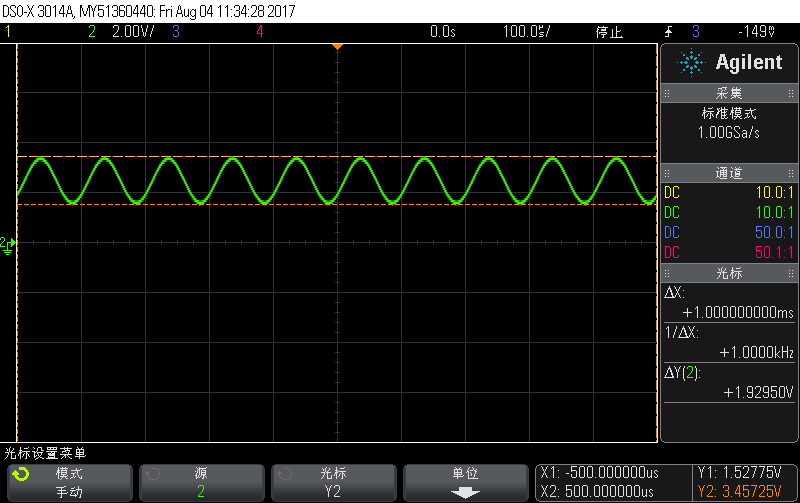
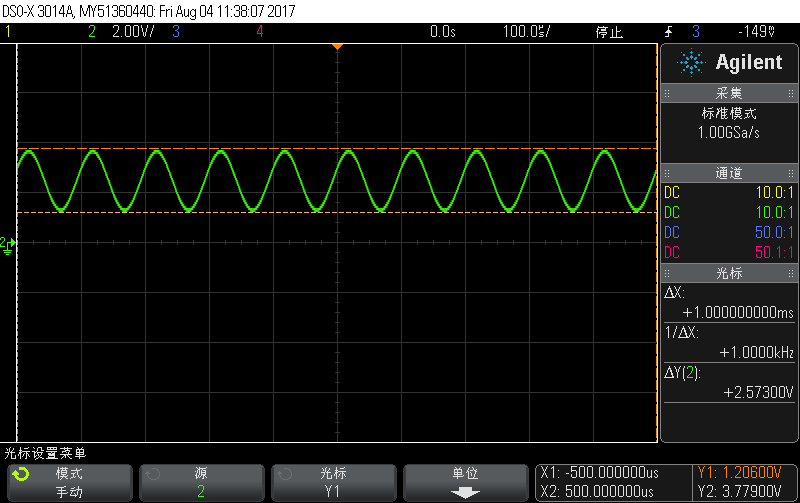
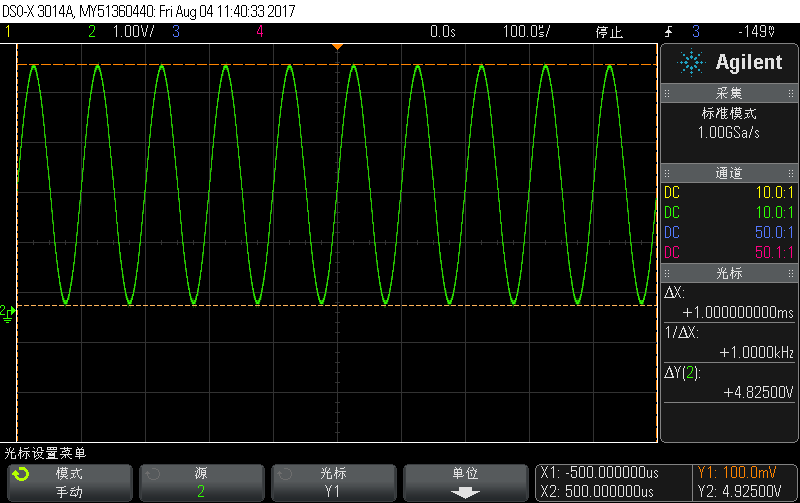
(2) For best accuracy performance, TI recommends that the IZx differential voltage (Vpp) is between 600 mVpp and 1.5 Vpp as measured at the OSIN and OCOS pins. What is the recommended voltage and the single ended vlotage on the OSIN and OCOS pins?
Best regards,
Thanks.