Hi,
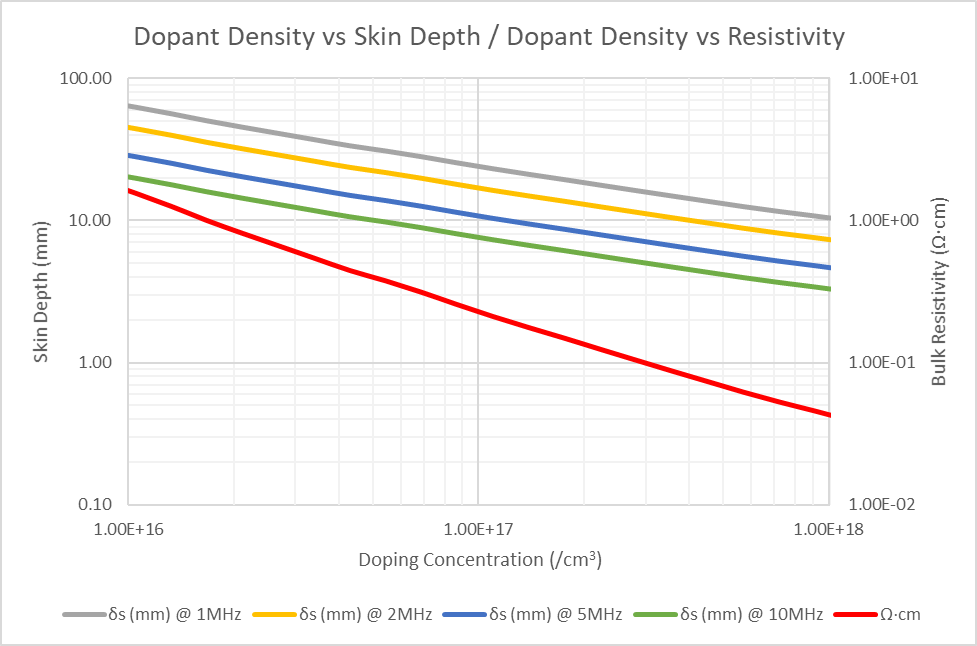
Background information: I would like to determine the dopant density (concentration of boron or phosphorous) in a silicon ingot. Due to chemistry I do not fully understand, when a block of it is cast, more non-metals at the top than at the bottom. The change in composition will have a significant and measurable impact on the resistivity according to literature I've read and some preliminary tests.
My proposed set-up: I will have a coil facing down at a fixed height. Below it, I will have the block on a motorized platform. I will laid the block on its side, such that the variation in composition, and thereby in resistivity, is now on the x axis. As the platform moves left or right, I will be able to observe a change in Rp.
My problem: I believe in order for this to work with any accuracy, the distance between the block and the coil has to be uniform. As the blocks are not perfectly flat, there can be up to 1.5mm of variation in the distance between the block and the coil.
My questions:
- Silicon, boron and phosphorous all have a relative permeability of 1. I believe that would mean the inductance measured at a certain distance to the ingot will be the same regardless of the composition. Is that correct?
- If so, is the Rp vs distance curve always the same?
I am hoping that if the answer to question 1 is yes, that I can create an instance lookup table that will give me the absolute distance from the sensor, regardless of composition.
If the Rp vs distance curve is always the same, I hope then to compensate for any distance changes, as deduced from the inductance.
Does this seem like a valid idea?