Hi Chris,
Sorry for asking too much. I wonder if you could help me with some of the basic logic analyzer setup for the SPI communication debugging on ADS1256?
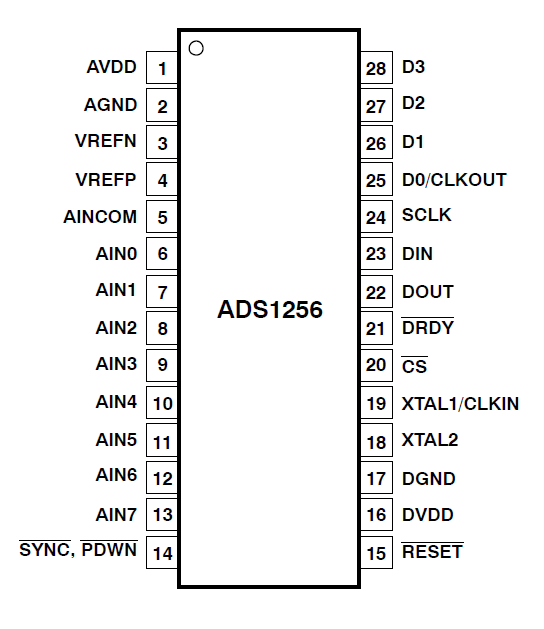
SCLK - pin 13 (SCK)
DIN - pin 11 (MOSI)
DOUT - pin 12 (MISO)
DRDY - pin 9
CS - pin 10 (CS)
RESET - pin 8 (or tie HIGH?)
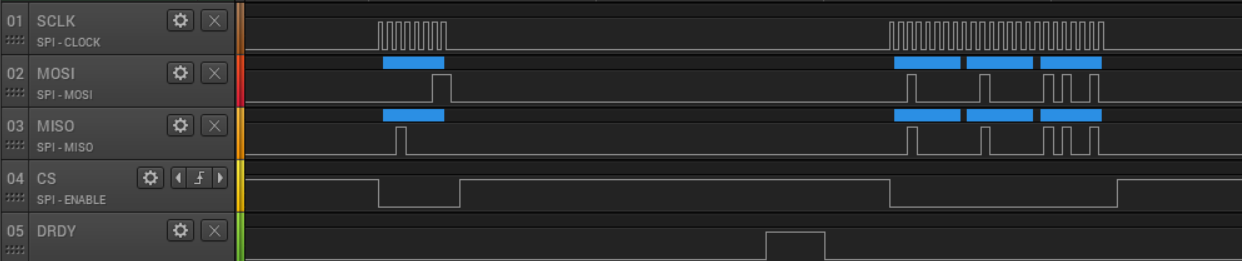
For the following pins, which should be set LOW, RISE, HIGH, FALL, or EDGE for the trigger type?
Thanks,
Khoi Ly