


Hello!
Tell me, please, what could be the problem.
I have a issue getting data if the PGA is activated.
Register configuration by default, I only change the gain.
To registers 0-3, values are written and read correctly.
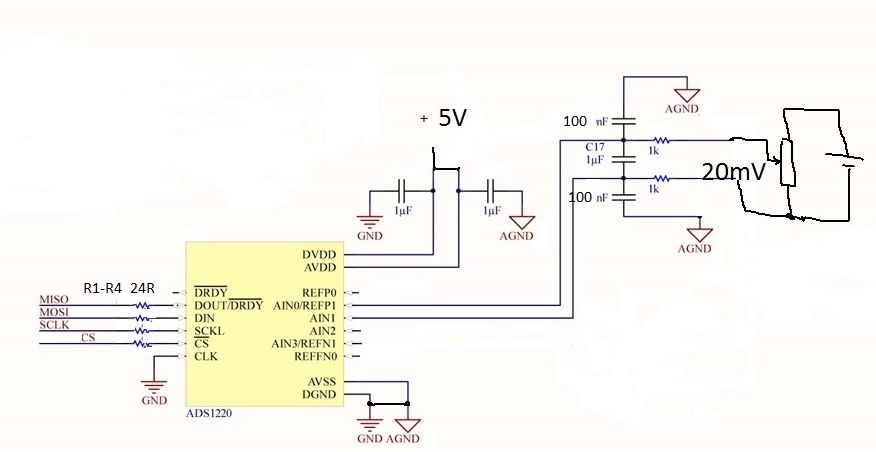
I connect the voltage from the battery to the input through a divider, about
20.6 mV, but I get this value only if the PGA bypass is on.
Values 20.65335, 20.65421, 20.65333, 20.65112, etc.
If the PGA bypass is turned off and set PGA to anything gain, I get very small floating values (0.00012, 0.00015, -0.00010, -0.00013, etc)
Maybe I'm doing something wrong?
Below I attached schematic, logic analizer screenshot, arduino code and lib
what I use.
Code
#include "ADS1220.h"
ADS1220 adc;
#define PGA 1
#define VREF 2.048
#define VFSR VREF/PGA
#define FULL_SCALE (((long int)1<<23)-1)
void setup() {
Serial.begin(9600);
adc.begin(9, 8);
adc.setGain(PGA);
adc.setConversionMode(1); //continious mode
adc.setMultiplexer(0X00);
adc.setPGAbypass(true); //PGA OFF
uint8_t Buff = 0;
Buff = adc.readRegister(0);
Serial.print("REG0 = ");
Serial.println(Buff, BIN);
Buff = adc.readRegister(1);
Serial.print("REG1 = ");
Serial.println(Buff, BIN);
Buff = adc.readRegister(2);
Serial.print("REG2 = ");
Serial.println(Buff, BIN);
Buff = adc.readRegister(3);
Serial.print("REG3 = ");
Serial.println(Buff, BIN);
}
void loop() {
char outstr[10];
if (adc.isDataReady()) {
long test = adc.readADC();
float a = convertToMilliV(test);
dtostrf(a, 10, 5, outstr);
Serial.println(outstr);
}
delay(300);
}
float convertToMilliV(int32_t i32data)
{
return (float)((i32data * VFSR * 1000) / FULL_SCALE);
}

CPP file
#include "ADS1220.h" #include "Arduino.h" #include "SPI.h" ADS1220::ADS1220() { } void ADS1220::writeRegister(uint8_t address, uint8_t value) { digitalWrite(ADS1220_CS_PIN, LOW); SPI.transfer(CMD_WREG|(address<<2)); // What not setting num bytes? SPI.transfer(value); startSync(); // Send start/sync for continuous conversion mode delayMicroseconds(1); // Delay a minimum of td(SCCS) digitalWrite(ADS1220_CS_PIN, HIGH); } uint8_t ADS1220::readRegister(uint8_t address) { digitalWrite(ADS1220_CS_PIN,LOW); SPI.transfer(CMD_RREG|(address<<2)); // What not setting num bytes? uint8_t data = SPI.transfer(SPI_MASTER_DUMMY); digitalWrite(ADS1220_CS_PIN,HIGH); return data; } void ADS1220::begin(uint8_t cs_pin, uint8_t drdy_pin) { // Set pins up ADS1220_CS_PIN = cs_pin; ADS1220_DRDY_PIN = drdy_pin; // Configure the SPI interface (CPOL=0, CPHA=1) SPI.begin(); SPI.setBitOrder(MSBFIRST); SPI.setDataMode(SPI_MODE1); // Configure chip select as an output pinMode(ADS1220_CS_PIN, OUTPUT); // Configure DRDY as as input (mfg wants us to use interrupts) pinMode(ADS1220_DRDY_PIN, INPUT); digitalWrite(ADS1220_CS_PIN, LOW); // Set CS Low delayMicroseconds(100); // Wait a minimum of td(CSSC) reset(); // Send reset command delayMicroseconds(100);; // Delay a minimum of 50 us + 32 * tclk // Sanity check read back (optional) startSync(); // Send start/sync for continuous conversion mode delayMicroseconds(1); // Delay a minimum of td(SCCS) digitalWrite(ADS1220_CS_PIN, HIGH); // Clear CS to high } bool ADS1220::isDataReady() { if (digitalRead(ADS1220_DRDY_PIN) == HIGH) { return false; } return true; } long ADS1220::readADC() { digitalWrite(ADS1220_CS_PIN, LOW); // Take CS low delayMicroseconds(1); // Minimum of td(CSSC) long adcVal = SPI.transfer(SPI_MASTER_DUMMY); adcVal = (adcVal << 8) | SPI.transfer(SPI_MASTER_DUMMY); adcVal = (adcVal << 8) | SPI.transfer(SPI_MASTER_DUMMY); adcVal = ( adcVal << 8 ); adcVal = ( adcVal >> 8 ); delayMicroseconds(1); // Minimum of td(CSSC) digitalWrite(ADS1220_CS_PIN, HIGH); return adcVal; } byte * ADS1220::readADC_Array() { digitalWrite(ADS1220_CS_PIN, LOW); // Take CS low delayMicroseconds(1); // Minimum of td(CSSC) static byte dataarray[3]; for (int x = 0; x < 3 ; x++) { dataarray[x] = SPI.transfer(SPI_MASTER_DUMMY); } delayMicroseconds(1); // Minimum of td(CSSC) digitalWrite(ADS1220_CS_PIN, HIGH); return dataarray; } //Single Conversion read modes long ADS1220::readADC_Single() { digitalWrite(ADS1220_CS_PIN, LOW); // Take CS low delayMicroseconds(1); // Minimum of td(CSSC) SPI.transfer(0x08); while(digitalRead(ADS1220_DRDY_PIN) == HIGH) { //Wait to DRDY goes down //Not a good thing //Code could be stuck here //Need a improve later } long adcVal = SPI.transfer(SPI_MASTER_DUMMY); adcVal = (adcVal << 8) | SPI.transfer(SPI_MASTER_DUMMY); adcVal = (adcVal << 8) | SPI.transfer(SPI_MASTER_DUMMY); adcVal = ( adcVal << 8 ); adcVal = ( adcVal >> 8 ); delayMicroseconds(1); // Minimum of td(CSSC) digitalWrite(ADS1220_CS_PIN, HIGH); return adcVal; } byte * ADS1220::readADC_SingleArray() { digitalWrite(ADS1220_CS_PIN, LOW); // Take CS low delayMicroseconds(1); // Minimum of td(CSSC) SPI.transfer(0x08); while(digitalRead(ADS1220_DRDY_PIN) == HIGH) { //Wait to DRDY goes down //Not a good thing //Code could be stuck here //Need a improve later } static byte dataarray[3]; for (int x = 0; x < 3 ; x++) { dataarray[x] = SPI.transfer(SPI_MASTER_DUMMY); } delayMicroseconds(1); // Minimum of td(CSSC) digitalWrite(ADS1220_CS_PIN, HIGH); return dataarray; } void ADS1220::sendCommand(uint8_t command) { // Following Protocentral's code, not sure exactly what's going on here. digitalWrite(ADS1220_CS_PIN, LOW); delay(2); digitalWrite(ADS1220_CS_PIN, HIGH); delay(2); digitalWrite(ADS1220_CS_PIN, LOW); delay(2); SPI.transfer(command); delay(2); digitalWrite(ADS1220_CS_PIN, HIGH); } void ADS1220::writeRegisterMasked(uint8_t value, uint8_t mask, uint8_t address) { // Write the value to a register using the mask to leave the rest of the // register untouched. This does not shift the value, so it shoudl be provided // shifted to the appropriate positions. // Read what's in the register now uint8_t register_contents = readRegister(address); // Flip the mask so that it's zeros where we'll put data and zero out that // part of the register's contents register_contents = register_contents & ~mask; // OR in the value to be written register_contents = register_contents | value; // Write it back out writeRegister(address, register_contents); } void ADS1220::setMultiplexer(uint8_t value) { /* Set multiplexer | Value | AINp | AINn | | ----- | ---- | ---- | | 0x00 | AIN0 | AIN1 | | 0X01 | AIN0 | AIN2 | | 0X02 | AIN0 | AIN3 | | 0X03 | AIN1 | AIN2 | | 0X04 | AIN1 | AIN3 | | 0X05 | AIN2 | AIN3 | | 0X06 | AIN1 | AIN0 | | 0X07 | AIN3 | AIN2 | | 0X08 | AIN0 | AVSS | | 0X09 | AIN1 | AVSS | | 0X0A | AIN2 | AVSS | | 0X0B | AIN3 | AVSS | | 0X0C | REF/4 MON | | 0X0D | APWR/4 MON | | 0X0E | SHORTED | */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x0E) { value = 0x00; } value = value << 4; // Shift to match with mask writeRegisterMasked(value, REG_MASK_MUX, CONFIG_REG0_ADDRESS); } void ADS1220::setGain(uint8_t gain) { /* Sets ADC gain. Possible values are 1, 2, 4, 8, 16, 32, 64, 128. */ uint8_t value = 0x00; switch(gain) { case 1: value = 0x00; break; case 2: value = 0x01; break; case 4: value = 0x02; break; case 8: value = 0x03; break; case 16: value = 0x04; break; case 32: value = 0x05; break; case 64: value = 0x06; break; case 128: value = 0x07; break; default: value = 0x00; break; } value = value << 1; // Shift to match with mask writeRegisterMasked(value, REG_MASK_GAIN, CONFIG_REG0_ADDRESS); } void ADS1220::setPGAbypass(bool value) { /* Bypasses the PGA if true. PGA can only be disabled for gains 1, 2, 4. */ writeRegisterMasked(value, REG_MASK_PGA_BYPASS, CONFIG_REG0_ADDRESS); } void ADS1220::setDataRate(uint8_t value) { /* Sets the data rate for the ADC. See table 18 in datasheet for datarates in various operating modes. */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x07) { value = 0x00; } value = value << 5; // Shift to match with mask writeRegisterMasked(value, REG_MASK_DATARATE, CONFIG_REG1_ADDRESS); } void ADS1220::setOpMode(uint8_t value) { /* Sets the ADC operating mode: 0 - Normal mode 1 - Duty-cycle mode 2 - Turbo mode */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x02) { value = 0x00; } value = value << 3; // Shift to match with mask writeRegisterMasked(value, REG_MASK_OP_MODE, CONFIG_REG1_ADDRESS); } void ADS1220::setConversionMode(uint8_t value) { /* Sets the ADC conversion mode. 0 - Single shot mode 1 - continuous conversion mode */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x01) { value = 0x00; } value = value << 2; // Shift to match with mask writeRegisterMasked(value, REG_MASK_CONV_MODE, CONFIG_REG1_ADDRESS); } void ADS1220::setTemperatureMode(uint8_t value) { /* Controls the state of the internal temperature sensor. 0 - Disables temperature sensor 1 - Enables temperature sensor */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x01) { value = 0x00; } value = value << 1; // Shift to match with mask writeRegisterMasked(value, REG_MASK_TEMP_MODE, CONFIG_REG1_ADDRESS); } void ADS1220::setBurnoutCurrentSources(bool value) { /* Turns the 10uA burn-out current sources on or off. */ writeRegisterMasked(value, REG_MASK_BURNOUT_SOURCES, CONFIG_REG1_ADDRESS); } void ADS1220::setVoltageRef(uint8_t value) { /* Sets the voltage reference used by the ADC. 0 - Internal 2.048 V 1 - External on REFP0 and REFN0 inputs 2 - External on AIN0/REFP1 and AIN3/REFN1 inputs 3 - Use analog supply as reference */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x03) { value = 0x00; } value = value << 6; // Shift to match with mask writeRegisterMasked(value, REG_MASK_VOLTAGE_REF, CONFIG_REG2_ADDRESS); } void ADS1220::setFIR(uint8_t value) { /* Controls the FIR filter on the ADC. 0 - No 50 or 60 Hz rejection 1 - Both 50 and 60 Hz rejection 2 - 50 Hz rejection 3 - 60 Hz rejection */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x03) { value = 0x00; } value = value << 4; // Shift to match with mask writeRegisterMasked(value, REG_MASK_FIR_CONF, CONFIG_REG2_ADDRESS); } void ADS1220::setPowerSwitch(uint8_t value) { /* Configures behavior of low-side switch between AIN3/REFN1 and AVSS. 0 - Always open 1 - Automatically closes when START/SYNC command is sent and opens when POWERDOWN command is issues. */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x01) { value = 0x00; } value = value << 3; // Shift to match with mask writeRegisterMasked(value, REG_MASK_PWR_SWITCH, CONFIG_REG2_ADDRESS); } void ADS1220::setIDACcurrent(uint8_t value) { /* Set current for both IDAC1 and IDAC2 excitation sources. 0 - Off 1 - 10 uA 2 - 50 uA 3 - 100 uA 4 - 250 uA 5 - 500 uA 6 - 1000 uA 7 - 1500 uA */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x07) { value = 0x00; } writeRegisterMasked(value, REG_MASK_IDAC_CURRENT, CONFIG_REG2_ADDRESS); } void ADS1220::setIDAC1routing(uint8_t value) { /* Selects where IDAC1 is routed to. 0 - Disabled 1 - AIN0/REFP1 2 - AIN1 3 - AIN2 4 - AIN3/REFN1 5 - REFP0 6 - REFN0 */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x06) { value = 0x00; } value = value << 5; // Shift to match with mask writeRegisterMasked(value, REG_MASK_IDAC1_ROUTING, CONFIG_REG3_ADDRESS); } void ADS1220::setIDAC2routing(uint8_t value) { /* Selects where IDAC2 is routed to. 0 - Disabled 1 - AIN0/REFP1 2 - AIN1 3 - AIN2 4 - AIN3/REFN1 5 - REFP0 6 - REFN0 */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x06) { value = 0x00; } value = value << 2; // Shift to match with mask writeRegisterMasked(value, REG_MASK_IDAC2_ROUTING, CONFIG_REG3_ADDRESS); } void ADS1220::setDRDYmode(uint8_t value) { /* Controls the behavior of the DOUT/DRDY pin when new data are ready. 0 - Only the dedicated DRDY pin is used 1 - Data ready indicated on DOUT/DRDY and DRDY */ // Make sure the value is in the valid range. Otherwise set to 0x00 if (value > 0x01) { value = 0x00; } value = value << 1; // Shift to match with mask writeRegisterMasked(value, REG_MASK_DRDY_MODE, CONFIG_REG3_ADDRESS); } void ADS1220::reset() { sendCommand(CMD_RESET); } void ADS1220::startSync() { sendCommand(CMD_START_SYNC); } void ADS1220::powerDown() { sendCommand(CMD_PWRDWN); } void ADS1220::rdata() { sendCommand(CMD_RDATA); } void ADS1220::ReadRegister(int StartAddress, int NumRegs, unsigned * pData) { int i; digitalWrite(ADS1220_CS_PIN, LOW); // send the command byte SendByte(CMD_RREG | (((StartAddress<<2) & 0x0c) |((NumRegs-1)&0x03))); // get the register content for (i=0; i< NumRegs; i++) { *pData++ = ReceiveByte(); } digitalWrite(ADS1220_CS_PIN, HIGH); return; } void ADS1220::SendByte(unsigned char Value) { SPI.transfer(Value); } unsigned int ADS1220::ReceiveByte(void) { unsigned int readvalue; readvalue = SPI.transfer(0x00); return readvalue; }
header file
#ifndef ADS1220_h
#define ADS1220_h
#include "Arduino.h"
#define SPI_MASTER_DUMMY 0xFF
// Commands for the ADC
#define CMD_RESET 0x07
#define CMD_START_SYNC 0x08
#define CMD_PWRDWN 0x03
#define CMD_RDATA 0x1f
#define CMD_RREG 0x20
#define CMD_WREG 0x40
// Configuration registers
#define CONFIG_REG0_ADDRESS 0x00
#define CONFIG_REG1_ADDRESS 0x01
#define CONFIG_REG2_ADDRESS 0x02
#define CONFIG_REG3_ADDRESS 0x03
// Register masks for setings
// Register 0
#define REG_MASK_MUX 0xF0
#define REG_MASK_GAIN 0x0E
#define REG_MASK_PGA_BYPASS 0x01
// Register 1
#define REG_MASK_DATARATE 0xE0
#define REG_MASK_OP_MODE 0x18
#define REG_MASK_CONV_MODE 0x04
#define REG_MASK_TEMP_MODE 0x02
#define REG_MASK_BURNOUT_SOURCES 0x01
// Register 2
#define REG_MASK_VOLTAGE_REF 0xC0
#define REG_MASK_FIR_CONF 0x30
#define REG_MASK_PWR_SWITCH 0x08
#define REG_MASK_IDAC_CURRENT 0x07
// Register 3
#define REG_MASK_IDAC1_ROUTING 0xE0
#define REG_MASK_IDAC2_ROUTING 0x1C
#define REG_MASK_DRDY_MODE 0x02
#define REG_MASK_RESERVED 0x01
class ADS1220 {
public:
ADS1220();
uint8_t ADS1220_CS_PIN;
uint8_t ADS1220_DRDY_PIN;
void writeRegister(uint8_t address, uint8_t value);
uint8_t readRegister(uint8_t address);
void begin(uint8_t cs_pin, uint8_t drdy_pin);
bool isDataReady(void);
long readADC(void);
byte * readADC_Array(void);
long readADC_Single(void);
byte * readADC_SingleArray(void);
void sendCommand(uint8_t command);
void reset(void);
void startSync(void);
void powerDown(void);
void rdata(void);
void writeRegisterMasked(uint8_t value, uint8_t mask, uint8_t address);
void setMultiplexer(uint8_t value);
void setGain(uint8_t gain);
void setPGAbypass(bool value);
void setDataRate(uint8_t value);
void setOpMode(uint8_t value);
void setConversionMode(uint8_t value);
void setTemperatureMode(uint8_t value);
void setBurnoutCurrentSources(bool value);
void setVoltageRef(uint8_t value);
void setFIR(uint8_t value);
void setPowerSwitch(uint8_t value);
void setIDACcurrent(uint8_t value);
void setIDAC1routing(uint8_t value);
void setIDAC2routing(uint8_t value);
void setDRDYmode(uint8_t value);
void SendByte(unsigned char cData ); // Send byte to the ADS1220
unsigned int ReceiveByte(void); // Receive byte from the ADS1220
int GetChannel(void);
void ReadRegister(int StartAddress, int NumRegs, unsigned * pData);
};
#endif


