


Sir
I am new to ADS1220.
In Single shot conversion it provide me good data that i want.When i switch to continous mode it will provide me random values.
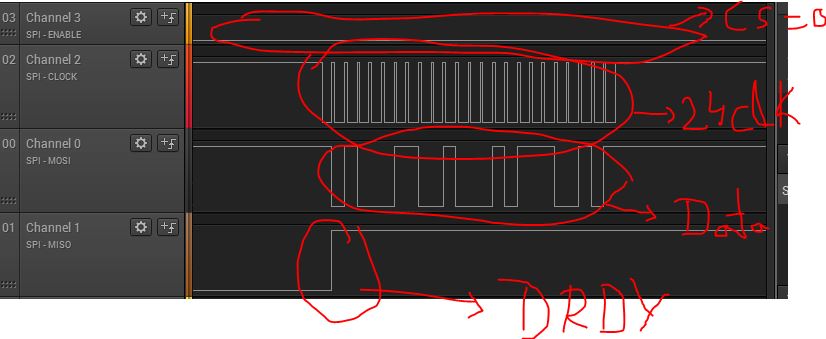
I dont understand how RDATA command in ADS1220 and also provide DRDY pin used to acess data in continous mode.
Here is the code:
#include "N76E003.h"
#include "SFR_Macro.h"
#include "Function_define.h"
#include "Common.h"
#include "Delay.h"
//typedef unsigned char uint8_t;
typedef signed long int32_t;
//typedef unsigned short uint16_t;
typedef signed short int16_t;
//typedef unsigned long uint32_t;
typedef signed char int8_t;
typedef float fp32_t;
typedef double fp64_t;
#define SS P15
#define MISO P01
#define MOSI P00
#define SCLK P10
#define DRDY P11
#define HIGH 1
#define LOW 0
#define CONFIG_REG0_ADDRESS 0x00
#define CONFIG_REG1_ADDRESS 0x01
#define CONFIG_REG2_ADDRESS 0x02
#define CONFIG_REG3_ADDRESS 0x03
#define WREG 0x40
#define RREG 0x20
#define SPI_MASTER_DUMMY 0xFF
#define RESET 0x06 //Send the RESET command (06h) to make sure the ADS1220 is properly reset after power-up
#define START 0x08 //Send the START/SYNC command (08h) to start converting in continuous conversion mode
//Config registers
#define CONFIG_REG0_ADDRESS 0x00
#define CONFIG_REG1_ADDRESS 0x01
#define CONFIG_REG2_ADDRESS 0x02
#define CONFIG_REG3_ADDRESS 0x03
#define REG_CONFIG1_DR_MASK 0xE0
#define REG_CONFIG0_PGA_GAIN_MASK 0x0E
#define REG_CONFIG0_MUX_MASK 0xF0
#define DR_20SPS 0x00
#define DR_45SPS 0x20
#define DR_90SPS 0x40
#define DR_175SPS 0x60
#define DR_330SPS 0x80
#define DR_600SPS 0xA0
#define DR_1000SPS 0xC0
#define PGA_GAIN_1 0x00
#define PGA_GAIN_2 0x02
#define PGA_GAIN_4 0x04
#define PGA_GAIN_8 0x06
#define PGA_GAIN_16 0x08
#define PGA_GAIN_32 0x0A
#define PGA_GAIN_64 0x0C
#define PGA_GAIN_128 0x0E
#define MUX_AIN0_AIN1 0x00
#define MUX_AIN0_AIN2 0x10
#define MUX_AIN0_AIN3 0x20
#define MUX_AIN1_AIN2 0x30
#define MUX_AIN1_AIN3 0x40
#define MUX_AIN2_AIN3 0x50
#define MUX_AIN1_AIN0 0x60
#define MUX_AIN3_AIN2 0x70
#define MUX_AIN0_AVSS 0x80
#define MUX_AIN1_AVSS 0x90
#define MUX_AIN2_AVSS 0xA0
#define MUX_AIN3_AVSS 0xB0
#define MUX_SE_CH0 0x80
#define MUX_SE_CH1 0x90
#define MUX_SE_CH2 0xA0
#define MUX_SE_CH3 0xB0
#define _BV(bit) (1<<(bit))
long value =0;unsigned char rd = 0;
int32_t mResult32 = 0;
unsigned char i =0,buf[3]=0,buf1[8];
void intialise_PIN(void);
void write_byte(unsigned char addr,unsigned char dat);
unsigned char read_byte(unsigned char addr);
void write(unsigned char addr);
unsigned char read(unsigned char ad);
void intialise_ADC(void);
long ADC_READ();
void SPI_Command(unsigned char data_in);
void intialise_ADC(void)
{
unsigned char rd = 0;
SPI_Command(RESET);
Timer0_Delay100us(300);
write_byte(CONFIG_REG0_ADDRESS,0x00);// Selection of MUX GAIN and PGA_Bypass
write_byte(CONFIG_REG1_ADDRESS,0x04);//Selection Continuos mode data
SPI_Command(START);
write_byte(CONFIG_REG2_ADDRESS,0x00);//FIR filter configuration
write_byte(CONFIG_REG3_ADDRESS,0x00); //DRDY PIn
//Timer0_Delay100us(100);
//rd = read_byte(CONFIG_REG0_ADDRESS);
// for(i=0;i<3;i++)
//
// {
// buf[i] = rd%10 + '0';
// rd = rd/10;
// }
// Send_Data_To_UART0 (buf[2]);
// Send_Data_To_UART0 (buf[1]);
// Send_Data_To_UART0 (buf[0]);
// Send_Data_To_UART0(0x0d);
//
//rd = read_byte(CONFIG_REG1_ADDRESS);
// for(i=0;i<3;i++)
//
// {
// buf[i] = rd%10 + '0';
// rd = rd/10;
// }
// Send_Data_To_UART0 (buf[2]);
// Send_Data_To_UART0 (buf[1]);
// Send_Data_To_UART0 (buf[0]);
// Send_Data_To_UART0(0x0d);
//rd = read_byte(CONFIG_REG2_ADDRESS);
// for(i=0;i<3;i++)
//
// {
// buf[i] = rd%10 + '0';
// rd = rd/10;
// }
// Send_Data_To_UART0 (buf[2]);
// Send_Data_To_UART0 (buf[1]);
// Send_Data_To_UART0 (buf[0]);
// Send_Data_To_UART0(0x0d);
//rd = read_byte(CONFIG_REG3_ADDRESS);
// for(i=0;i<3;i++)
//
// {
// buf[i] = rd%10 + '0';
// rd = rd/10;
// }
// Send_Data_To_UART0 (buf[2]);
// Send_Data_To_UART0 (buf[1]);
// Send_Data_To_UART0 (buf[0]);
// Send_Data_To_UART0(0x0d);
//
// Timer0_Delay100us(100);
}
void intialise_PIN(void)
{
P15_Quasi_Mode;// SS P15
P12_PushPull_Mode;
P00_Quasi_Mode;//MOSI P00
P10_Quasi_Mode;//SCLK
P01_Input_Mode;//MISO P01
//P01_PushPull_Mode;
P11_Input_Mode;//DRDY
InitialUART0_Timer3(4800);
SS = 1;
}
void write_byte(unsigned char addr,unsigned char dat)
{
SS = 0;
SCLK = 0;
Timer0_Delay100us(5);
//0 WREG =0;
write(WREG|(addr<<2));
write(dat);
Timer0_Delay100us(5);
SS = 1;
}
unsigned char read_byte(unsigned char addr)
{
uint8_t data1;
SS = 1; // Make sure we start with /CS high
SCLK = 0; // and CK low
Timer0_Delay100us(100);
write(RREG|(addr<<2));
data1 = read(addr);
Timer0_Delay100us(5); // and loop back
SS = 1;
return data1;
}
void write(unsigned char addr)
{
unsigned char SPICount; // Counter used to clock out the data
unsigned char SPIData;
SPIData = addr; // Preload the data to be sent with Address
for (SPICount = 0; SPICount < 8; SPICount++) // Prepare to clock out the Address byte
{
if (SPIData & 0x80) // Check for a 1
MOSI = 1; // and set the MOSI line appropriately
else
MOSI = 0;
SCLK = 1; // Toggle the clock line
SCLK = 0;
SPIData <<= 1; // Rotate to get the next bit
}
MOSI = 0;
}
unsigned char read(unsigned char ad)
{
unsigned char SPICount; // Counter used to clock out the data
unsigned char SPIData;
SPIData = 0;
for (SPICount = 0; SPICount < 8; SPICount++) // Prepare to clock in the data to be fread
{
SPIData <<=1; // Rotate the data
SCLK = 1; // Raise the clock to clock the data out of the MAX7456
SPIData = SPIData|MISO; // Read the data bit
// Timer0_Delay100us(2);
SCLK = 0; // Drop the clock ready for th enext bit
}
return SPIData;
}
long ADC_READ()
{
static unsigned char SPI_Buff[3],i;
int32_t mResult32 = 0;
long int bit24;
// SPI_Command(START);
if(DRDY == 0 )
{
SS = 0;
SCLK = 0;
Timer0_Delay100us(100);
for(i = 0; i < 3 ;i++)
{
SPI_Buff[i] = read(SPI_MASTER_DUMMY);
}
Timer0_Delay100us(100);
SS = 1;
bit24 = SPI_Buff[0];
bit24 = (bit24 << 8)|SPI_Buff[1];
bit24 = (bit24 << 8)|SPI_Buff[2];
bit24 = (bit24 << 8);
mResult32 = bit24;
}
return mResult32;
}
void SPI_Command(unsigned char data_in)
{
SS = 0;
Timer0_Delay100us(2);
SS = 1;
Timer0_Delay100us(2);
SS = 0;
Timer0_Delay100us(2);
write(data_in);
Timer0_Delay100us(2);
SS = 1;
}
void main()
{
bit RDY_old = 0,RDY_new = 0;unsigned char i;
long ADCResult =0;
long int bit24 = 0;
intialise_PIN();
intialise_ADC();
//SPI_Command(START);
P12=1;
while(1)
{
//SPI_Command(START);
//Timer1_Delay10ms(10);
RDY_old = RDY_new;//
RDY_new = DRDY;//
if(RDY_old == 1 && RDY_new == 0 )
{
P12=~P12;
SS = 0;
for ( i = 0; i < 24; i++)//To acess 24 bit data
{
SCLK = 0;
ADCResult = ADCResult << 1 | MISO;
SCLK = 1;
Timer0_Delay100us(5);
}
SS =1;
if((ADCResult&0x800000)==0x800000)
{
ADCResult = (0xffffff - ADCResult);
// Send_Data_To_UART0 (aa[1]);
}
else
{
ADCResult = ADCResult;
}
bit24 = ADCResult;
for(i=0;i<7;i++)
{
buf[i] = bit24%10 + '0';
bit24 = bit24/10;
}
//SPI_Command(RESET);
// Timer0_Delay100us(300);
// Send_Data_To_UART0 (buf[7]);
Send_Data_To_UART0 (buf[6]);
Send_Data_To_UART0 (buf[5]);
Send_Data_To_UART0(buf[4]);
Send_Data_To_UART0 (buf[3]);
Send_Data_To_UART0(buf[2]);
Send_Data_To_UART0(buf[1]);
Send_Data_To_UART0(buf[0]);
Send_Data_To_UART0(0x0d);
//write_byte(CONFIG_REG1_ADDRESS,0x00);
// SPI_Command(START);
}
}
}
ALso picture conitnous data:
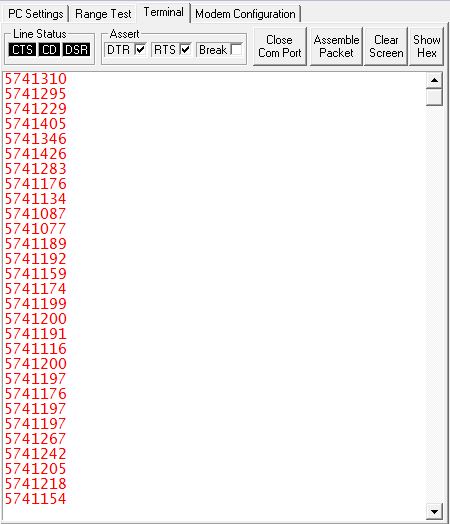
Here is Data look like continous mode:
Here image of single shot mode .is it possible to make single shot mode to continuous mode using START cmd again and again.
Please Help out this problem as soon as possible,
Please me out understand this problem
Pranav
Designinnova


