Dear All,
There's an issue during Data Read / Convert so the ADC sends out wrong digital values.
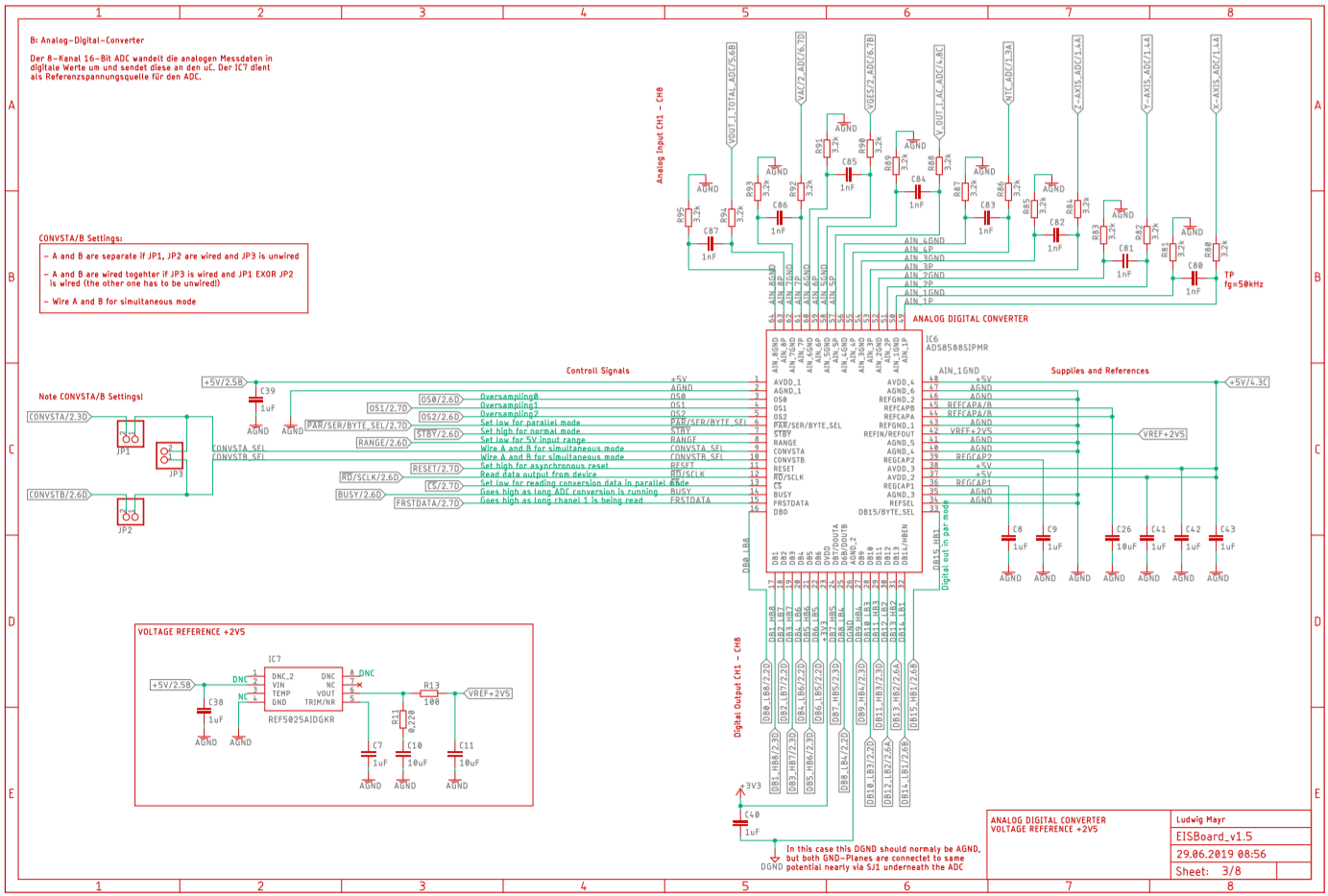
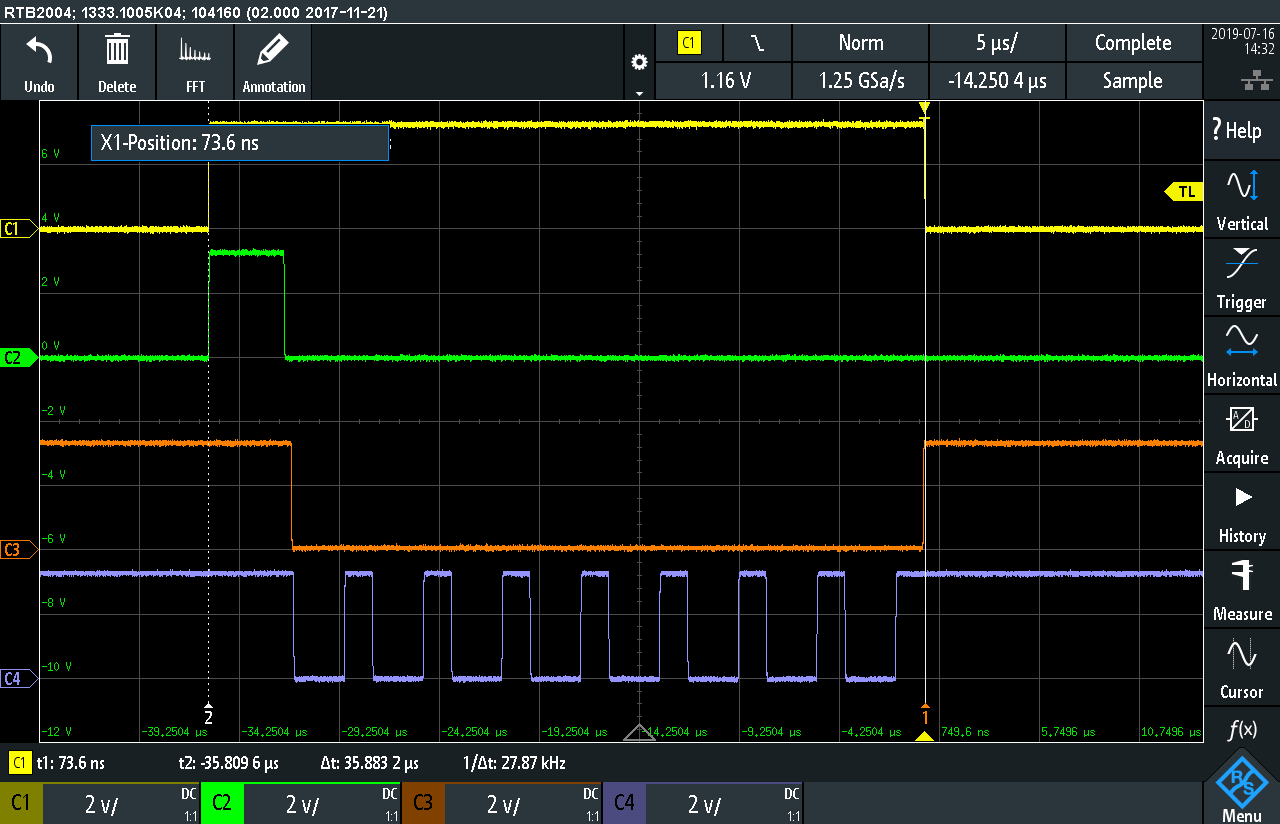
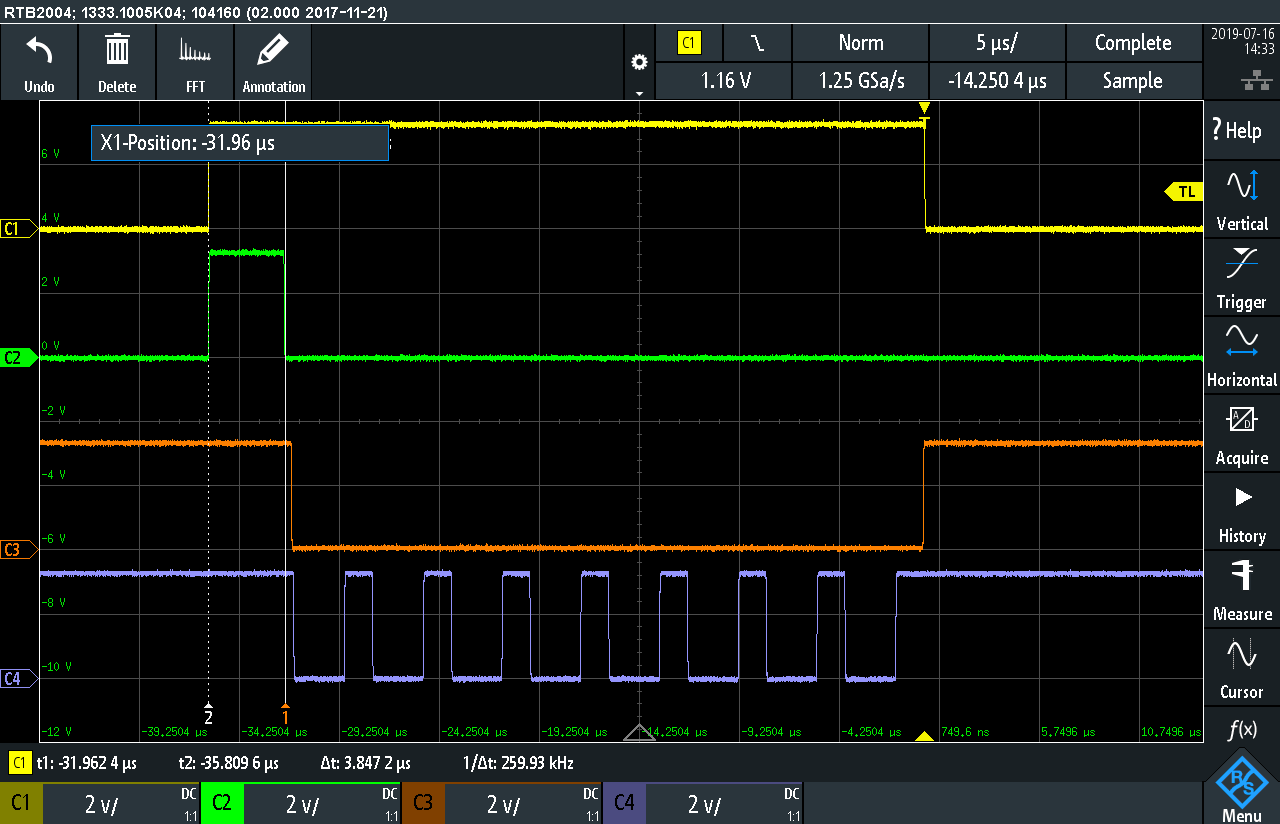
The ADC operates in 5 V-Range, simultaneous sampling on all input channels, parallel data read, external 2,5V-REF, no oversampling.
From Analog-Input-Range 0 V to 1,24 V the converted voltages are correct.
From 1,25 V to 2,4 V the digital voltages are higher by an offset of +2,5 V as they should be.
From 2,5 V to 3,75 V the digital voltages are higher by an offset of +1,25 V as they should be.
From 3,75 V to 5 V (PSR) the voltages are correct again.
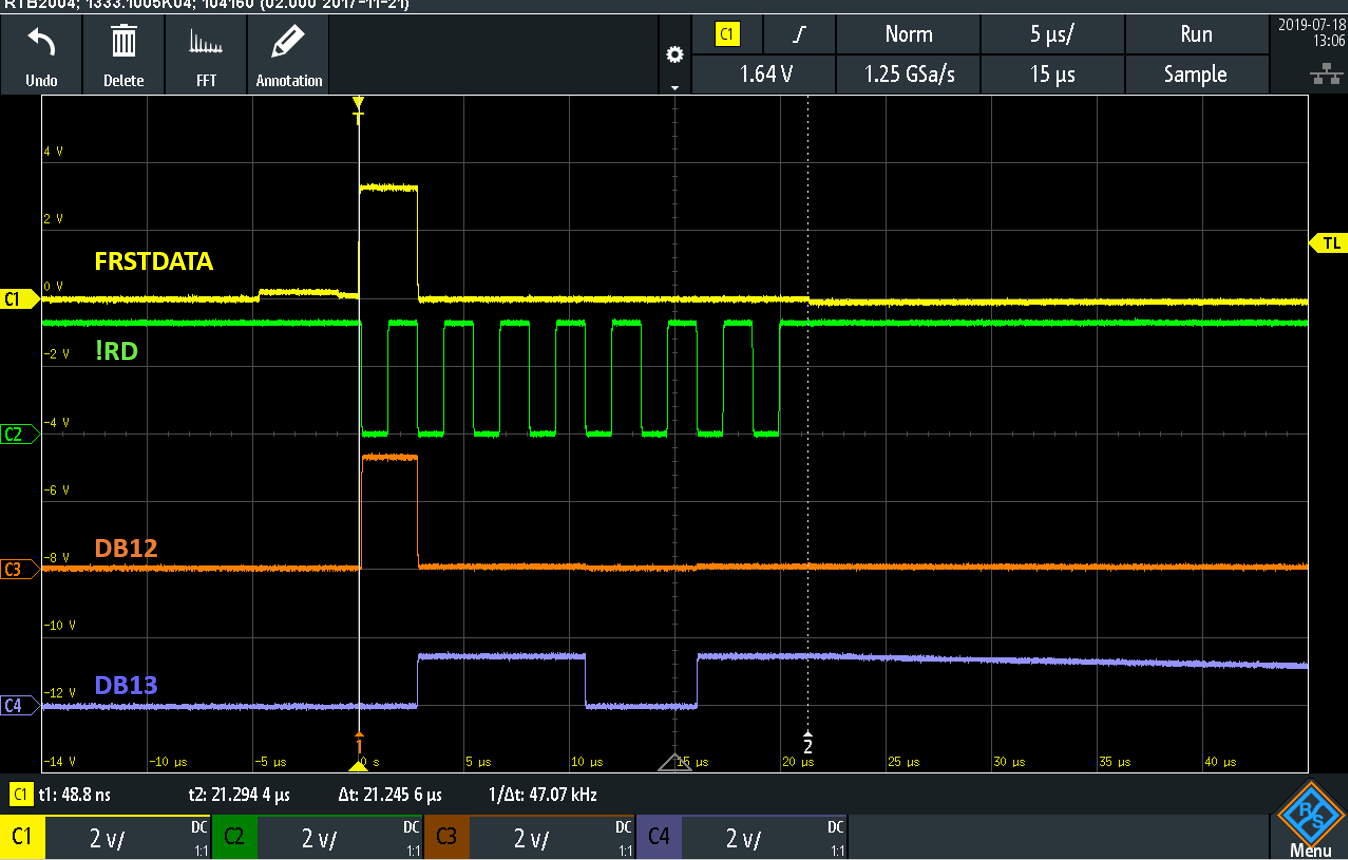
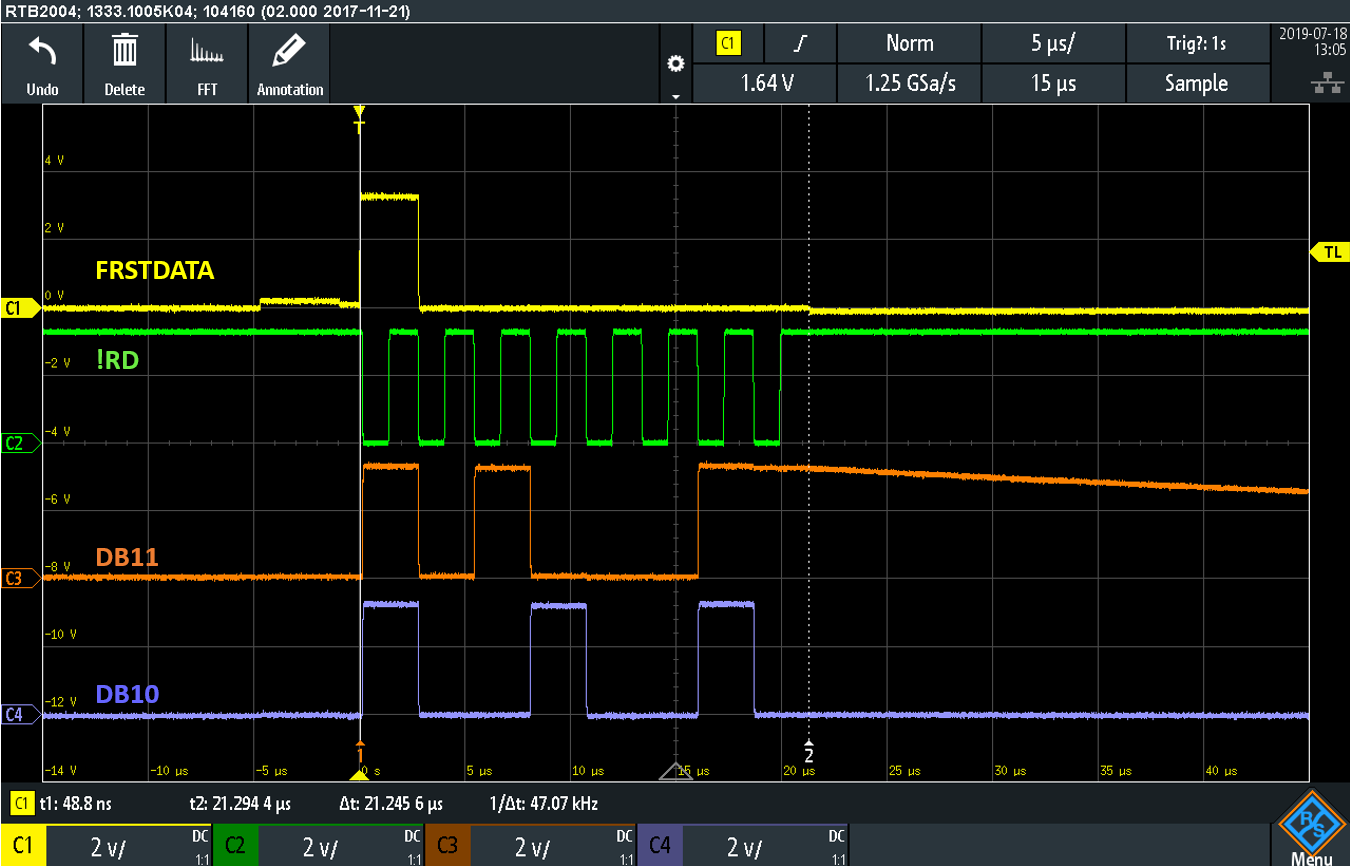
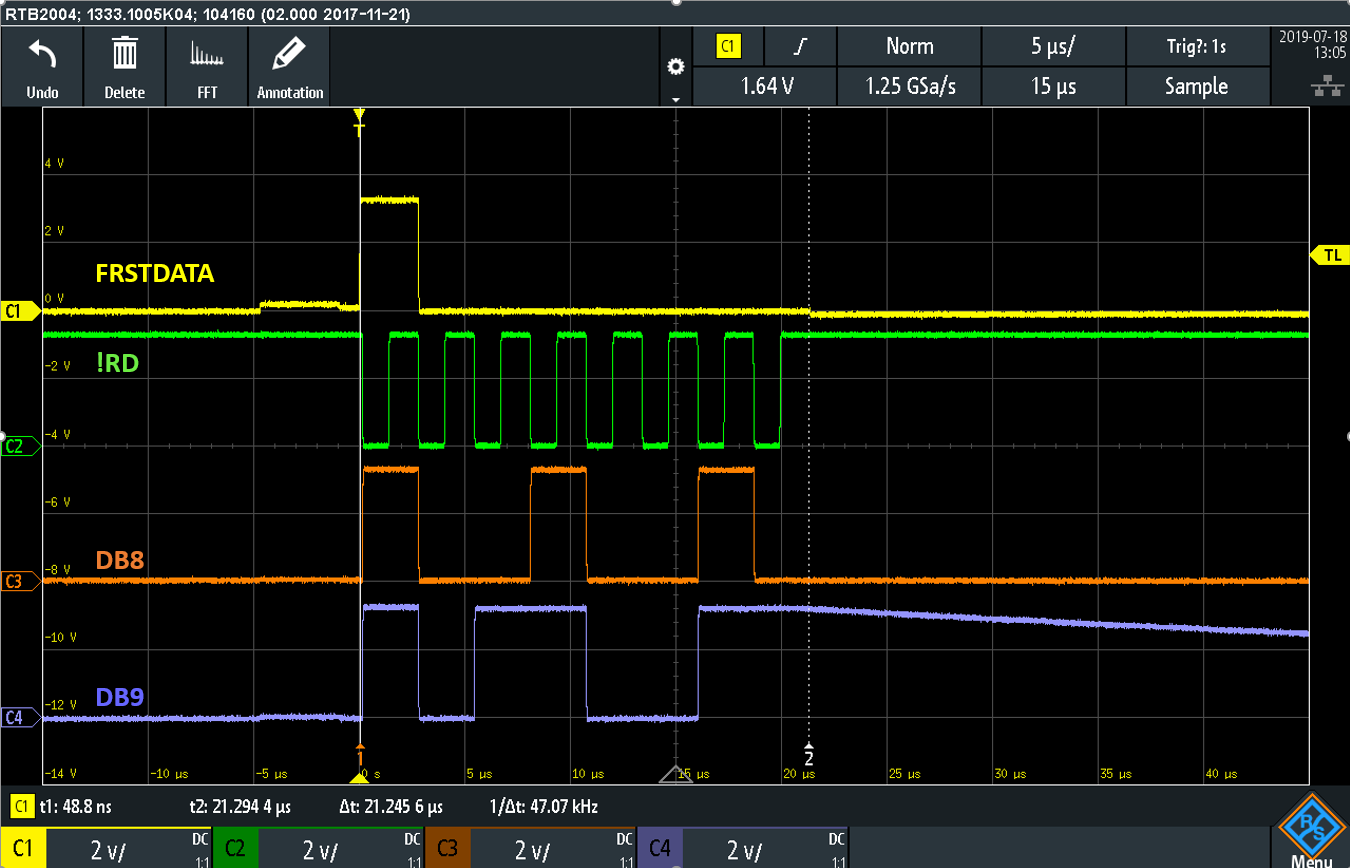
I've checked the Bits [DB15:0] with a logic analyzer, so my interpretation of the values has to be correct.
Do you have any Idea why the ADC is acting like that?
I am able to send you the layout, the schematic and the implemented C code from uC which is controlling the ADC if there is any contact.