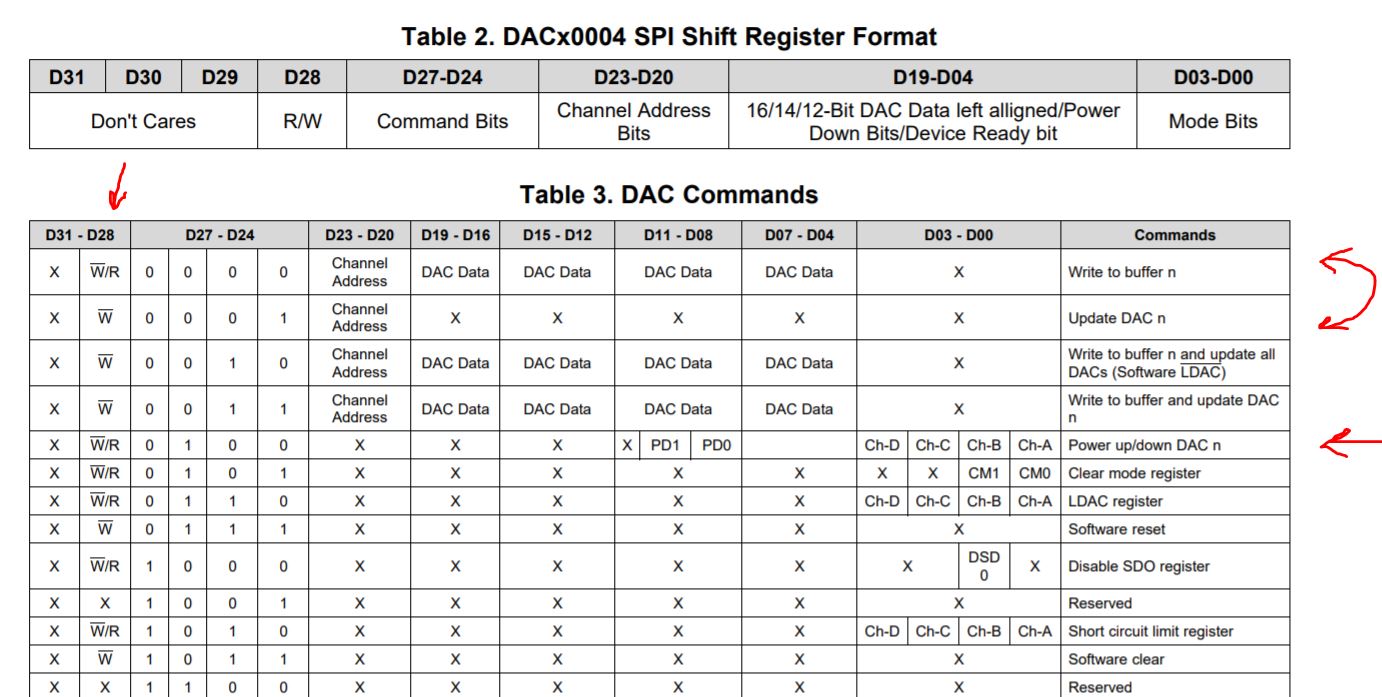
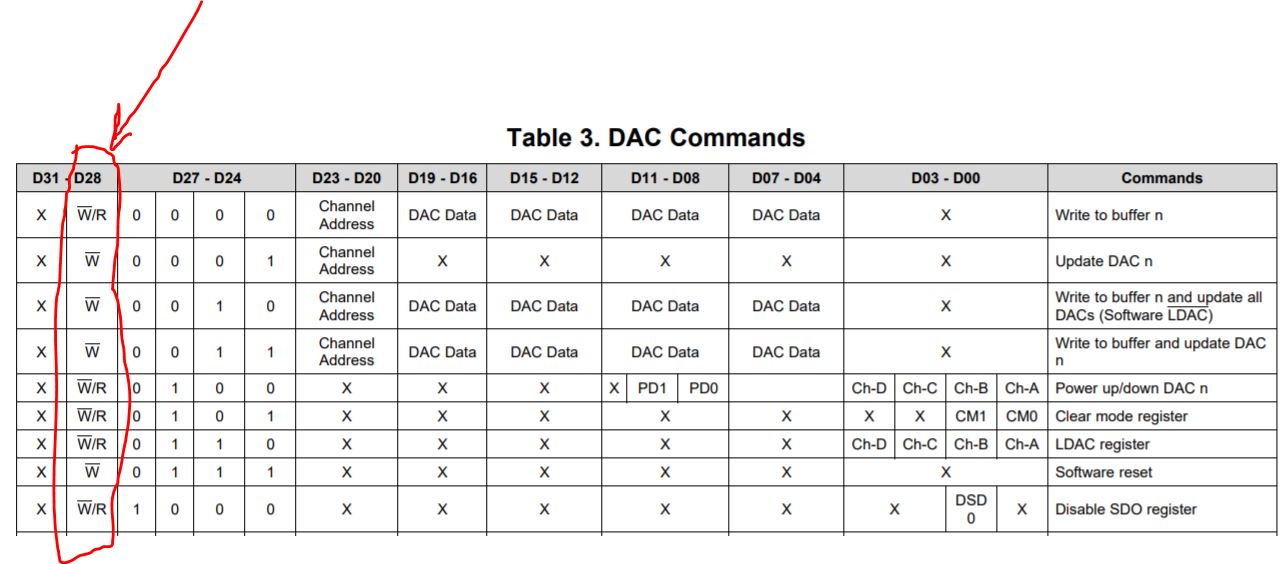
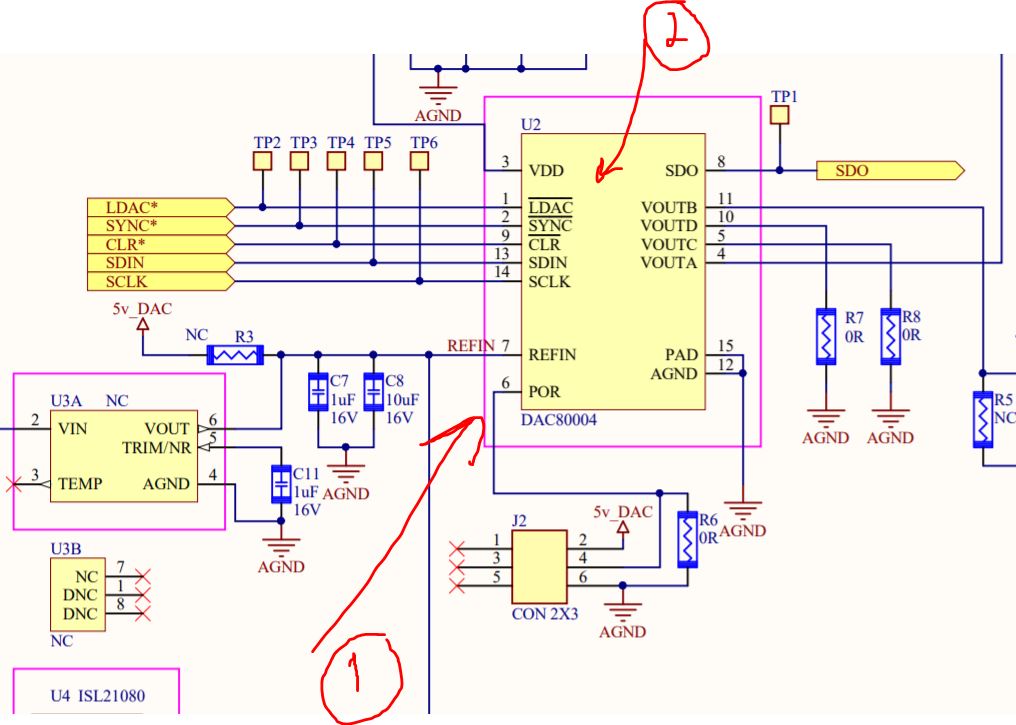
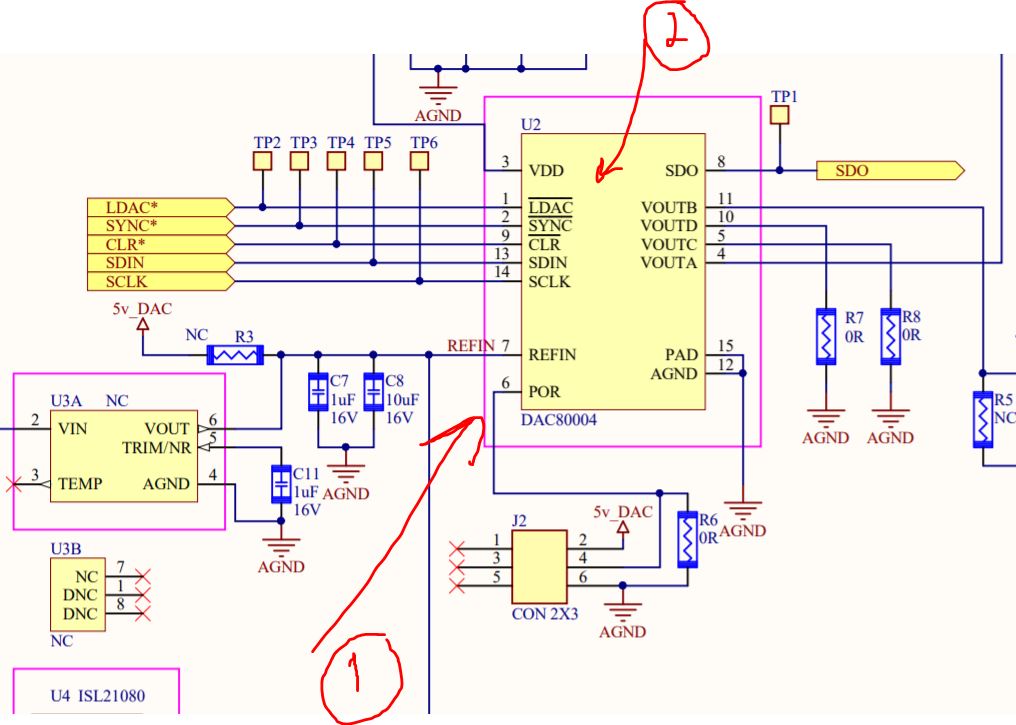
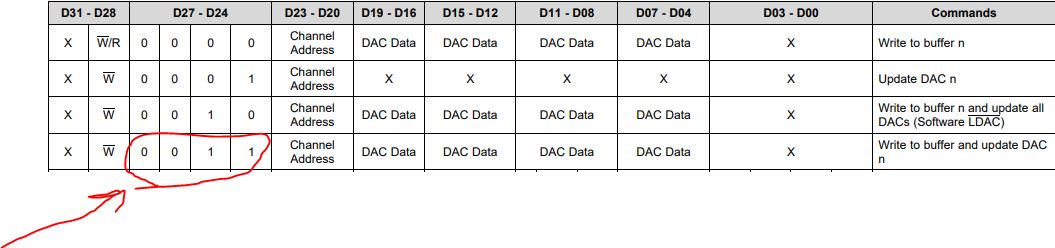
Hello, in the DAC80004 data sheet from the link shown bellow i cant see orders like power up power down,writing to a buffer ,updating the buffer.
So i guess there is some order of operation when i deal with DAC80004 .
Where can i see the full order of command on how to operate with dac80004
I can guess we need to power it on first then send write to buffer thenupdate dac then power off when we done.
Is there some order step by step command we we need to do ,in order to function it properly?
Thanks
https://www.ti.com/lit/ds/symlink/dac80004.pdf?ts=1596748188099