Hello ALC team,
I have a question about the I2C specification of DLPC350.
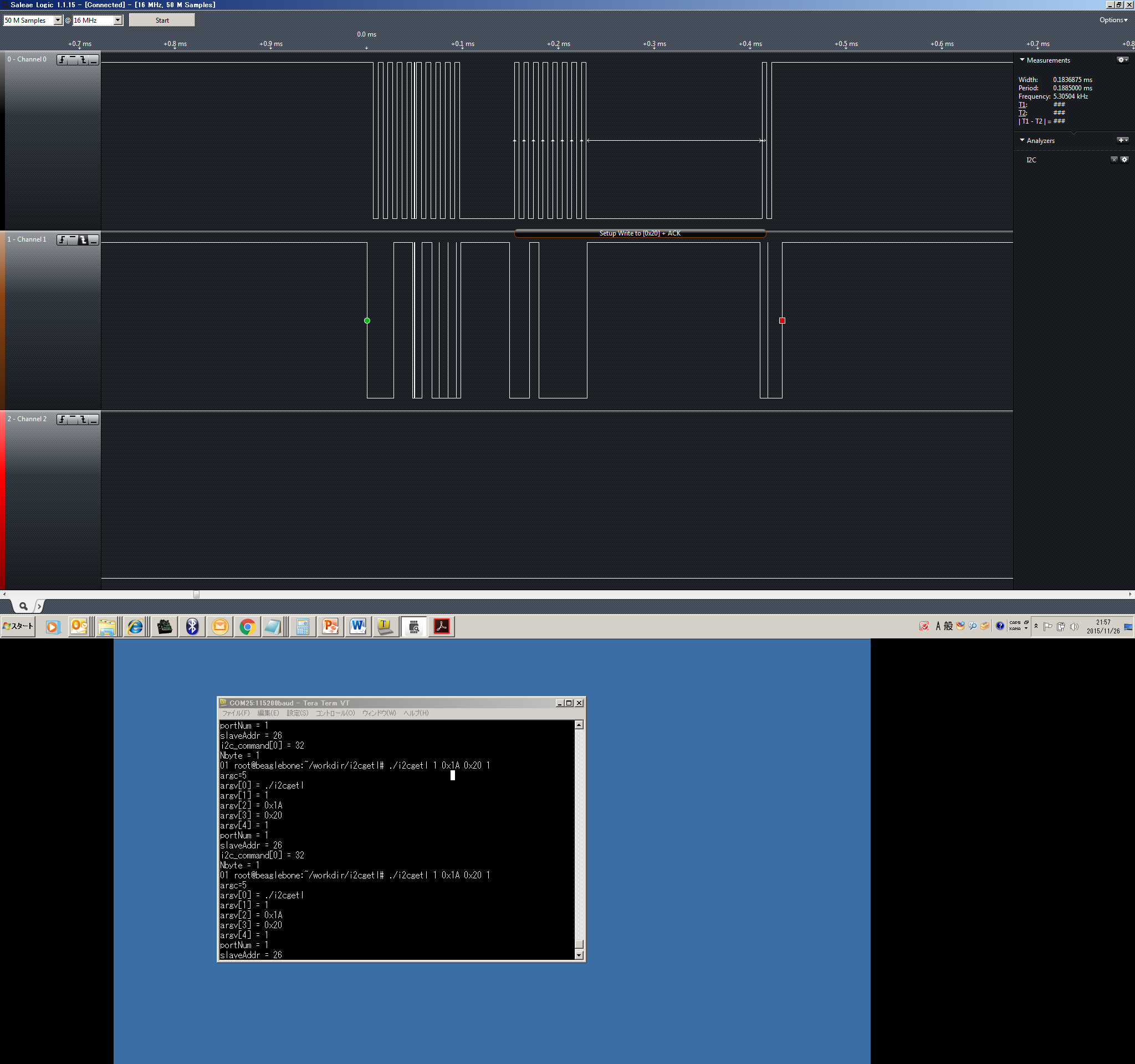
It looks ACK response from DLPC350 is delayed when I2C communication is done.
For example, to read the hardware status (0x20), the communication should be as follows;
Expected result : ST 0x3A A 0x20 A SP
Actual result : ST 0x3A A 0x20 ------------A
It looks the ACK is delayed about 180 us after 0x20 is sent. Please see the figure below.
ST = Start Condition
A = ACK
SP = Stop Condition
Q1:
It looks SCL is fixed to Low and SDA is fixed to High until ACK is returned.
Does this mean I2C WAIT specification is used?
During this period, is it the status that DLPC350 side is driving SCL and SDA signal?
Q2:
If DLPC350 side is driving SCL and SDA, after the DLPC350 outputs ACK with delay, does DLPC350 release driving these signals soon?
Q3:
After ACK is output with delay, DLPC350 would wait for receiving the Stop Condition from the host MPU.
Does any timeout to wait for Stop Condition exist in DLPC350 side?
If a timeout exists and occurs, is there any possibility that the DLPC350 is continuously driving SCL and SDA?
It would be helpful if you have any comment on these questions.
Best Regards,
Nobu Arai