


Hello,
I'm trying to create a point cloud using the software found here: http://www.ti.com/tool/tida-00254
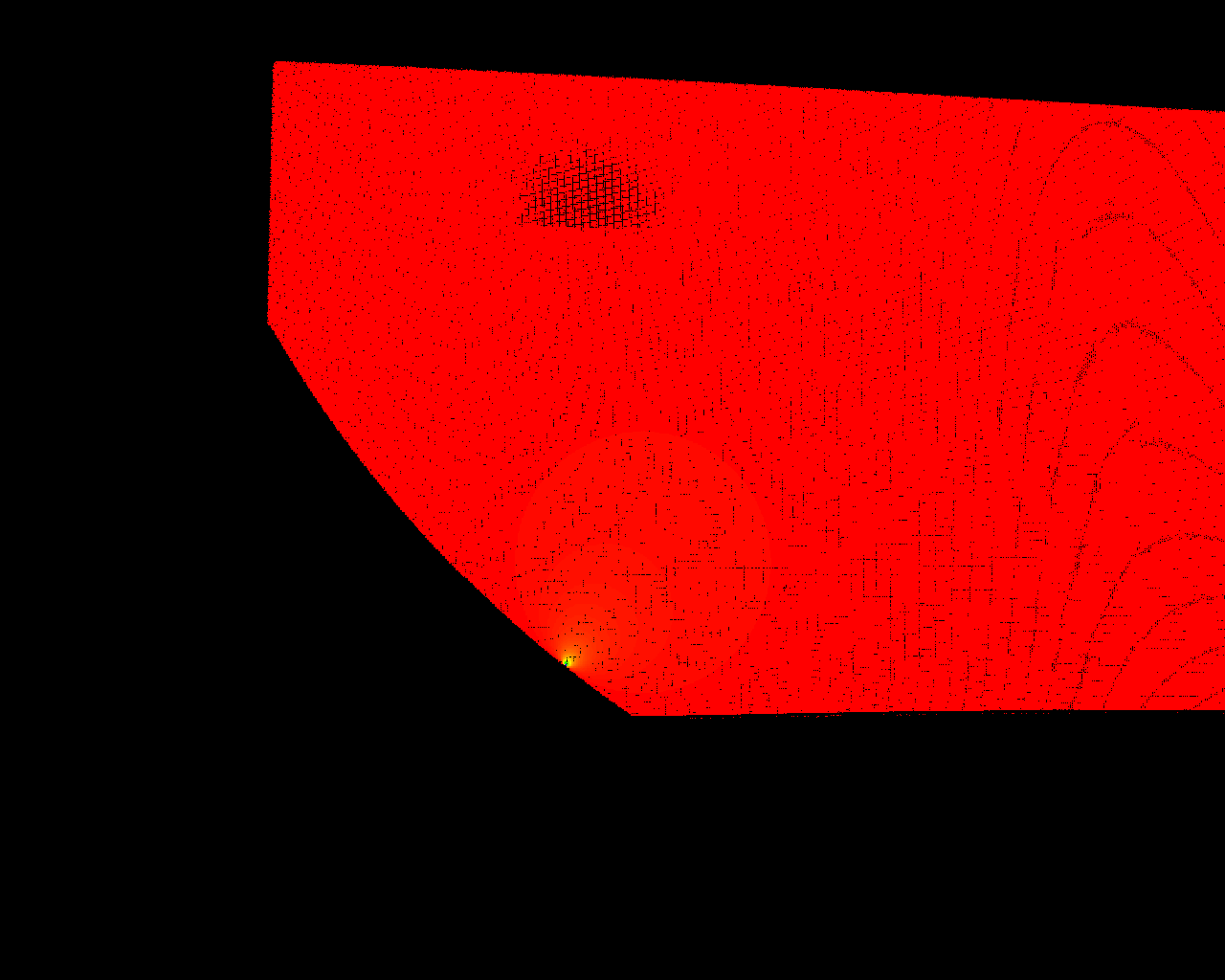
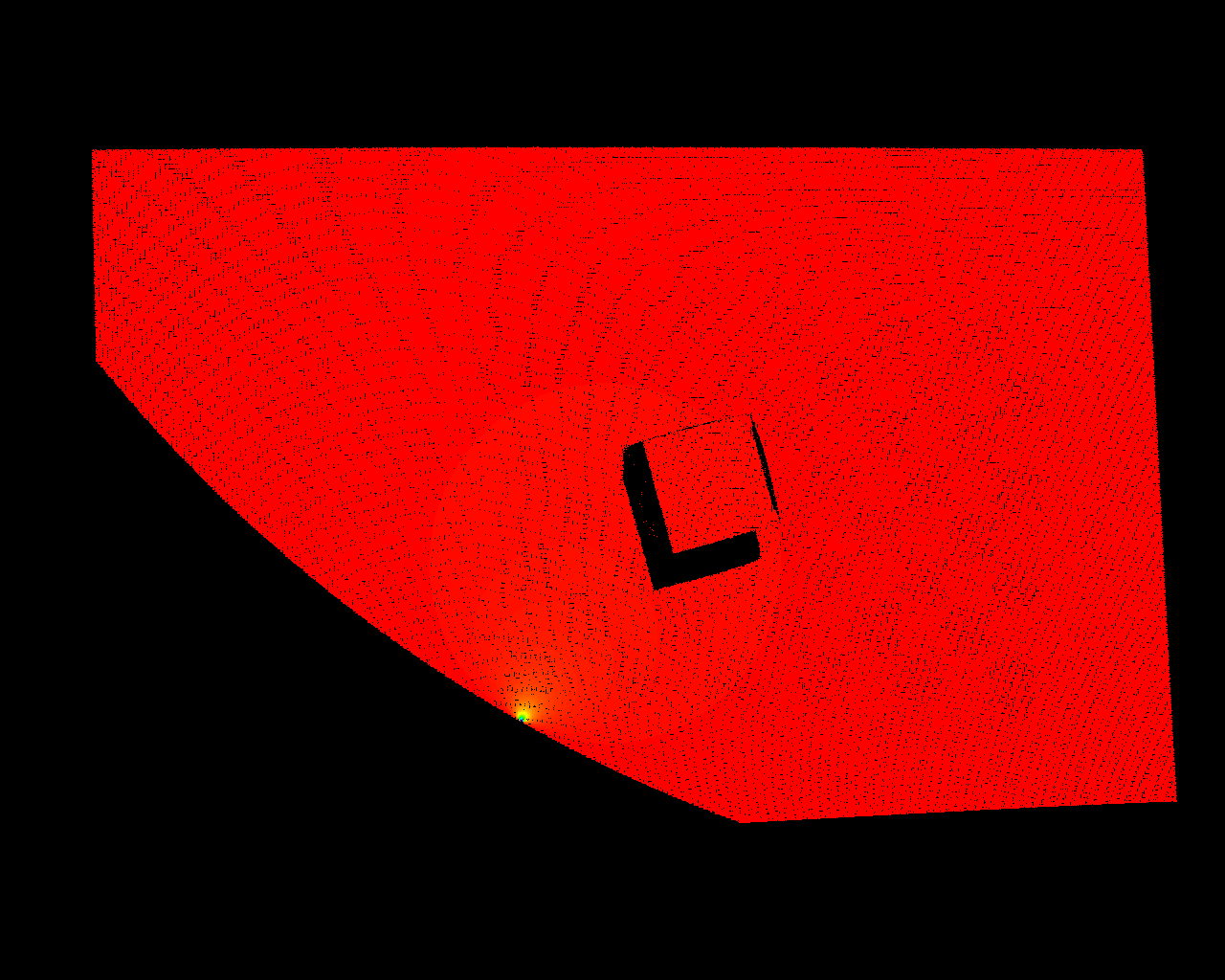
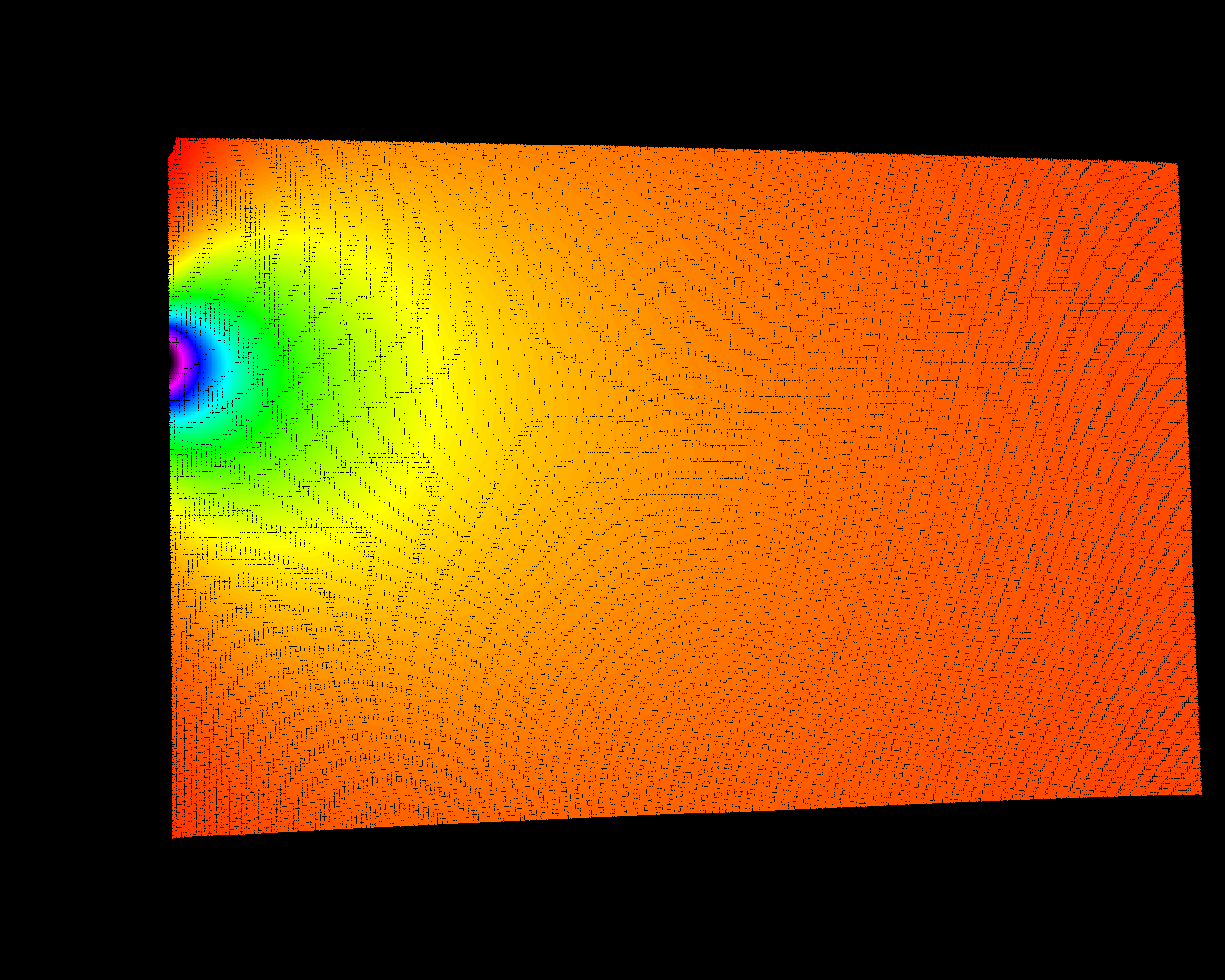
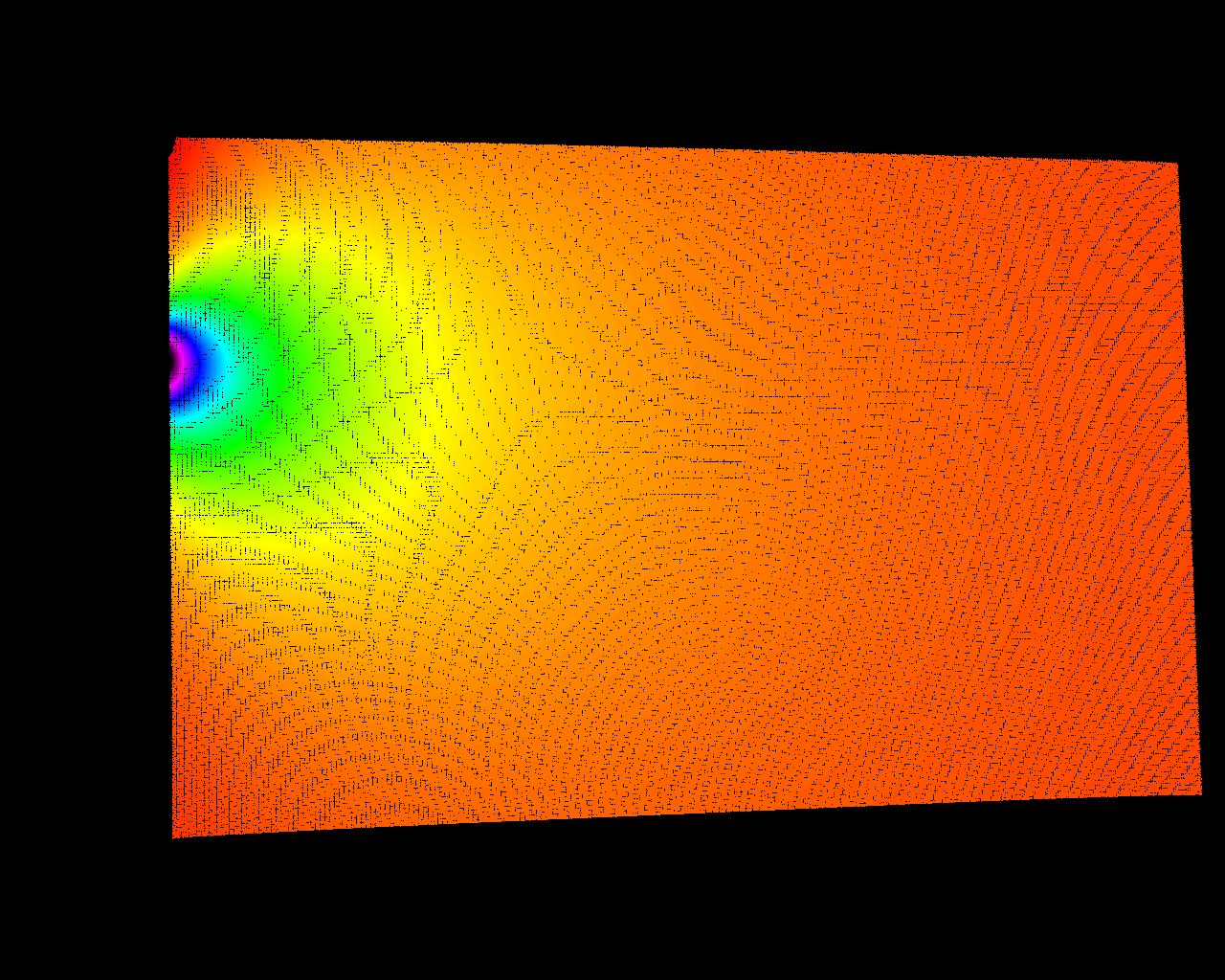
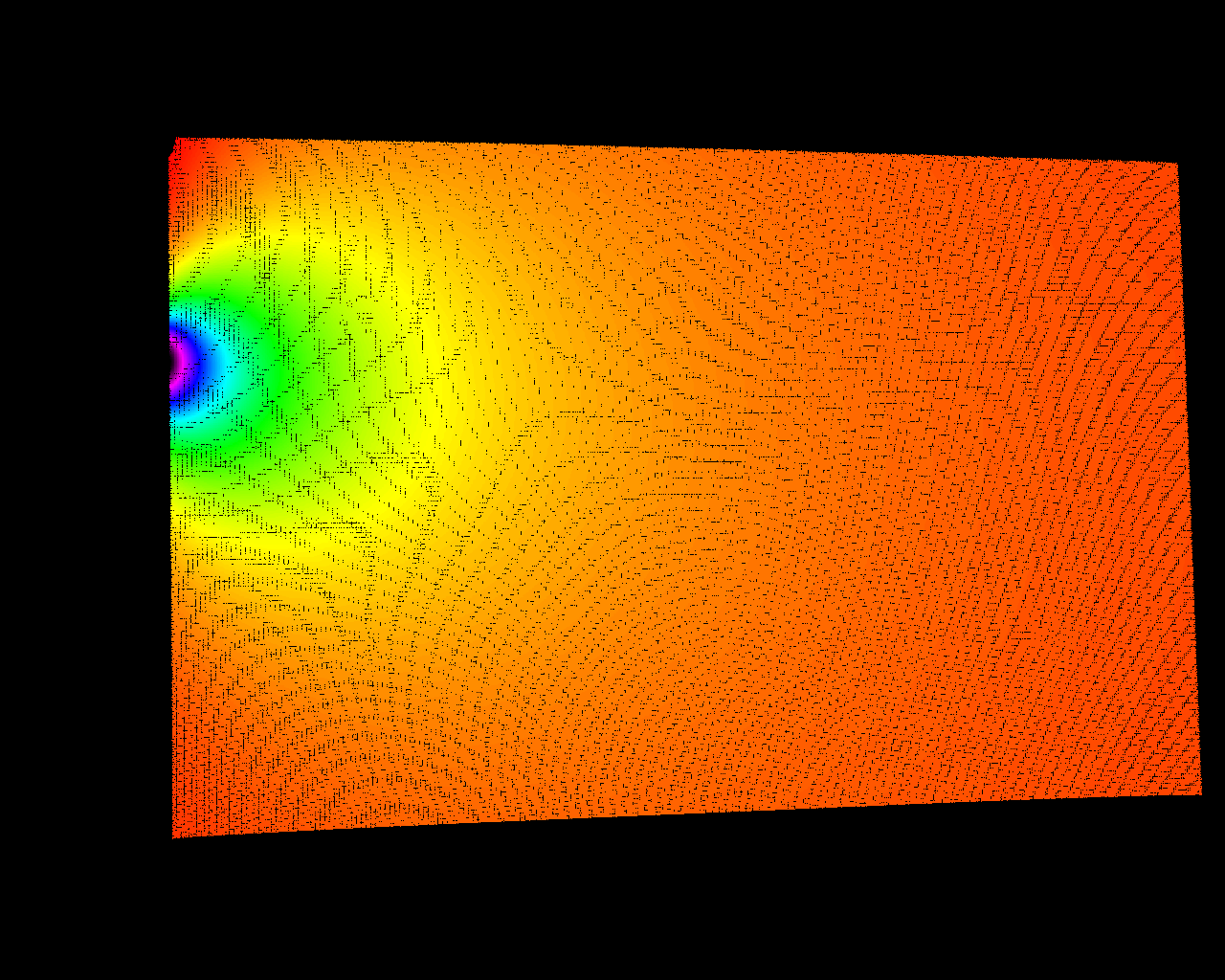
When I scan a flat surface, I get the following depth map:
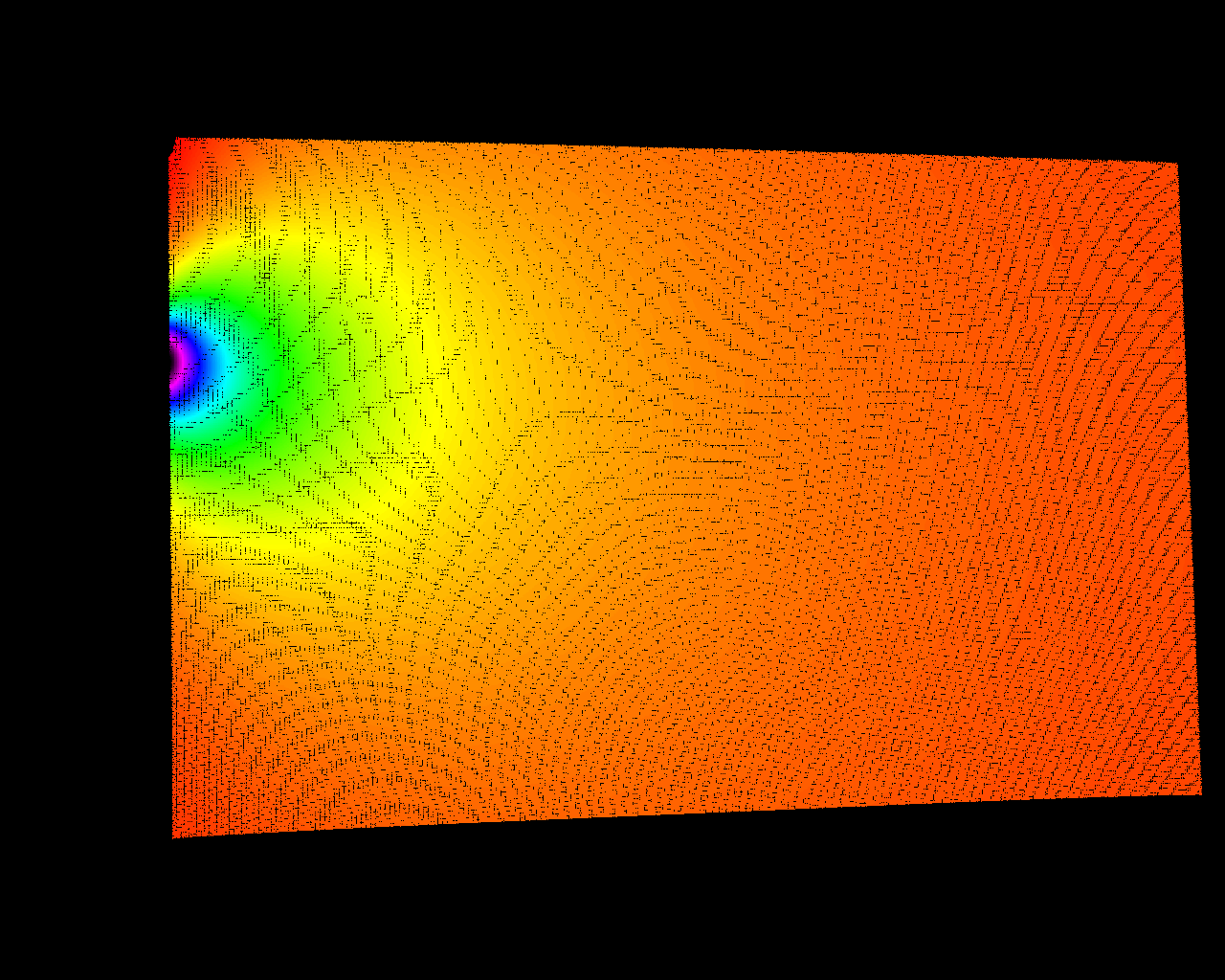
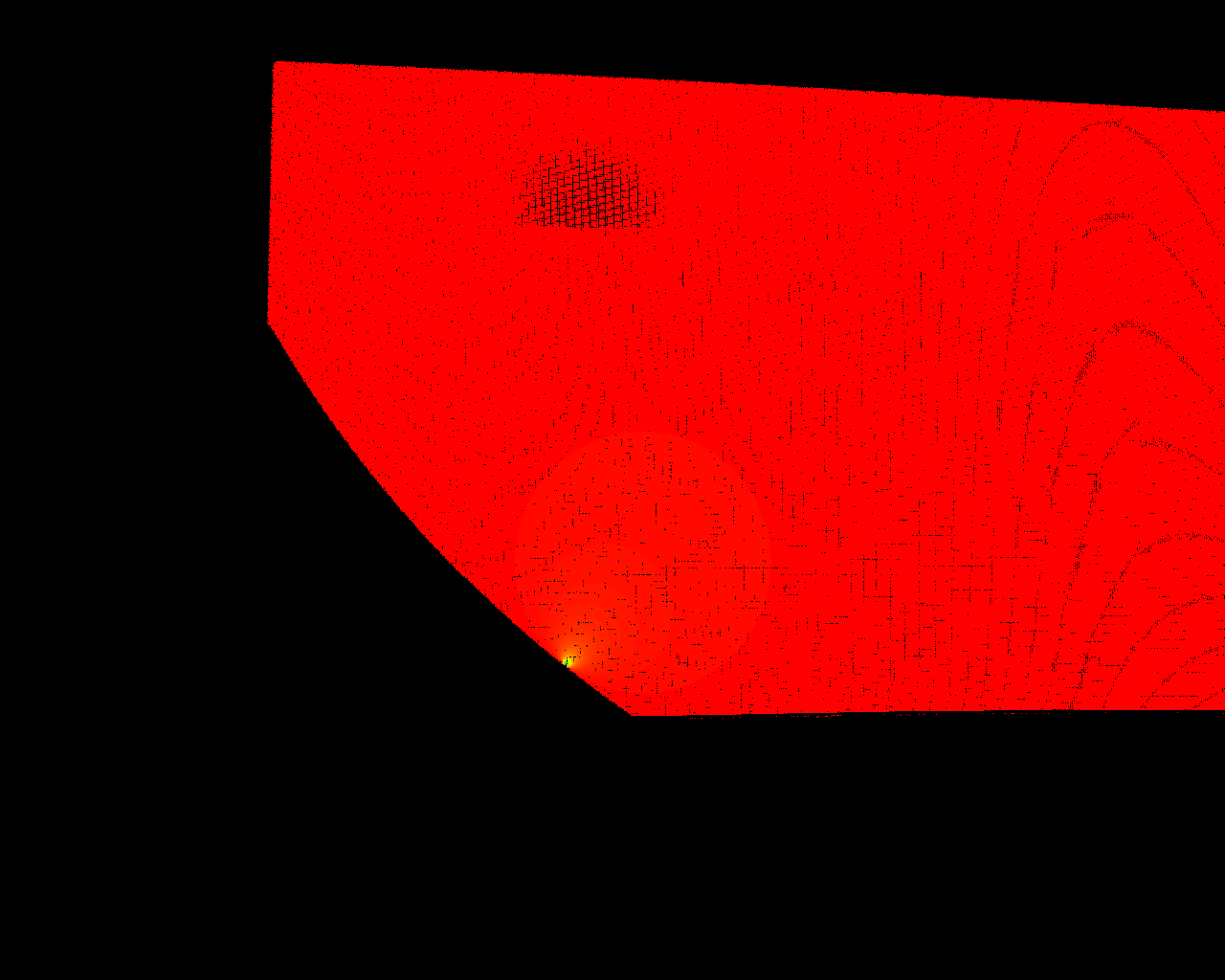
For some reason, it isn't flat. When we view the point cloud in meshlab we get this result:
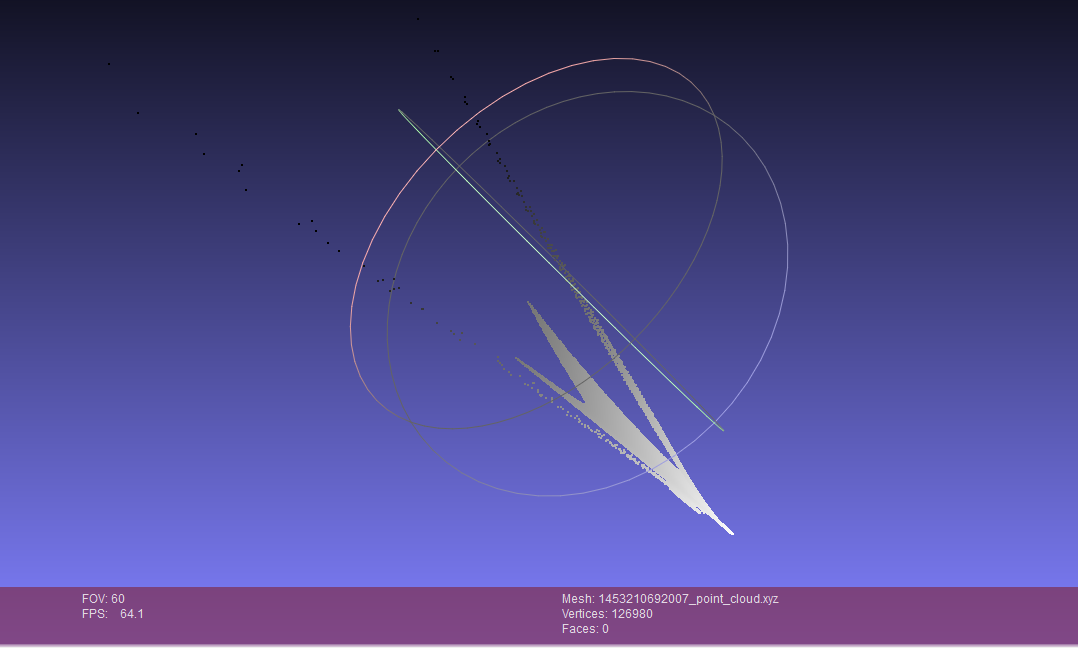
These are all wrong and I don't know why.
I've calibrated the camera with a reprojection error of 0.300224 and the projector with a repojection error of 1.10386852
Is there a solution to this problem?
<reprojection_error>3.0022461246092108e-001</reprojection_error>



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}