



Part Number: TCAN332
Tool/software:
I'm currently seeing some very inconsistent noise on my CAN Bus.
One packet 'burst' is relatively clean:
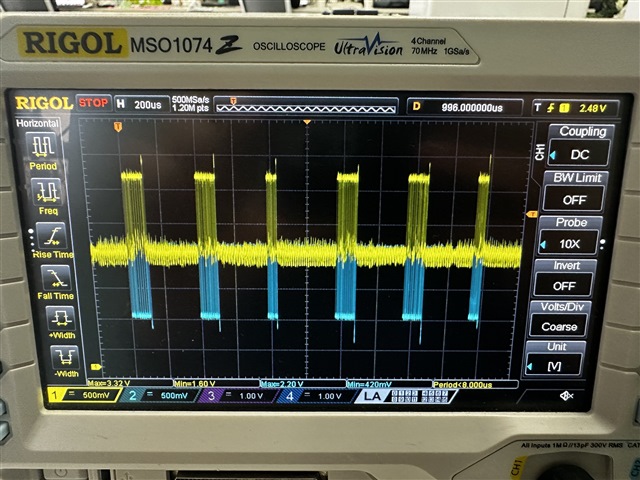

While another packet 'burst' seems to have a lot more noise:


I don't understand why these specific packets are either picking up/inducing extra noise when the other ones are not if they are on the same bus. Would the noise not be consistent throughout all boards, regardless of who is sending/receiving data?
Please let me know if more info on the setup is needed.
Thanks in advance!



