Other Parts Discussed in Thread: SN65HVD234
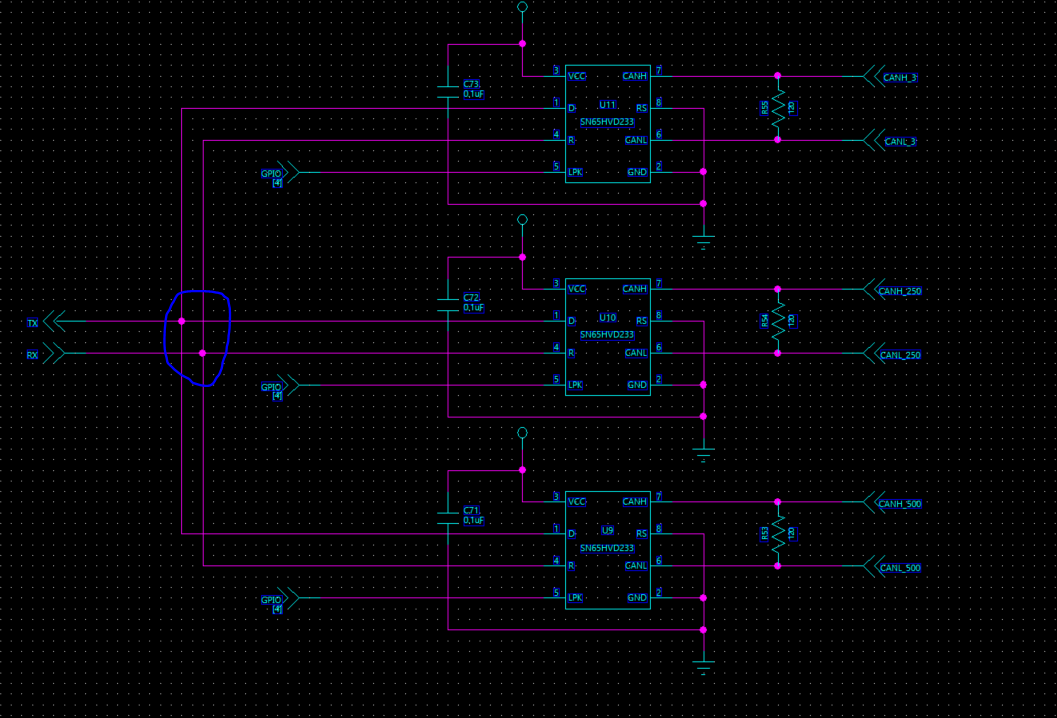
I would like to use three of these transceivers and connect their CANH/CANL pins to three different CAN buses. Then I would like to multiplex the D and R pins of the three transceivers into a single D and R output to my CAN Controller. I would then control each transceivers by the LPK function via the MCU. All the three CAN buses would be active all the time but I would only choose to output a certain BUS data using the LPK to turn on the relevant transceiver.