Hello,
I am quite new to the industrial CAN world and I am seeing intermittent issues on my CAN bus. I am seeing one of the nodes not reply for several hundred milliseconds. which leads to random issues happening. This seems to only happen after long periods of operation and the frequency of events increases the longer they are left powered. Once power cycled the issue seems to reset until they are powered for longer periods of time.
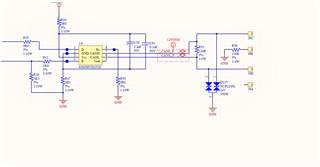
My CAN bus uses isolated transceivers such as the ISO1050, but there are also non isolated transceivers such as the SN65HVD251D. What is the best way to connect these together? Obviously CAN_H is connected and CAN_L is as well, I am using 2 wire shielded cable and it properly terminated on each end of the bus. The cable length is rather short and within the proper spec. However the COMMON pin on the ISO1050 was left open. Where should this be connected to? Should I ground it to the potential of the SN65? Should I switch to a different shielded cabling?
Thanks,
Matt