


Tool/software:
Hi,
We are using the ISOW1044 as indicated in the datasheet Figure 11-1, including the 47uF caps recommended in 11.2.1.
Some exceptions to the application circuit are:
- The 4.7k resistor between EN/FLT and V_IO is a 10k.
- pin 2 "IN" is not connected
- pin 4 "STB" is connected to ground (open triangle ground in application circuit)
- FB is a 742792641, 300R @ 100MHz
We did not include optional termination or bus protection.
The network is a Vector VN1630A and the DUT containing the ISOW1044. 120Ω each end. CAN ground wired both ends, TSP.
Terminators are on the bus as 120Ω from CAN_H to CAN_L. We are not using split terminators.
What I'm seeing during operation of the DUT is CAN Errors (about 0.3% error rate) that look to be caused by "bumps" in the CAN trace. This bump occurs at various stages of the message, resulting in various bit positions.
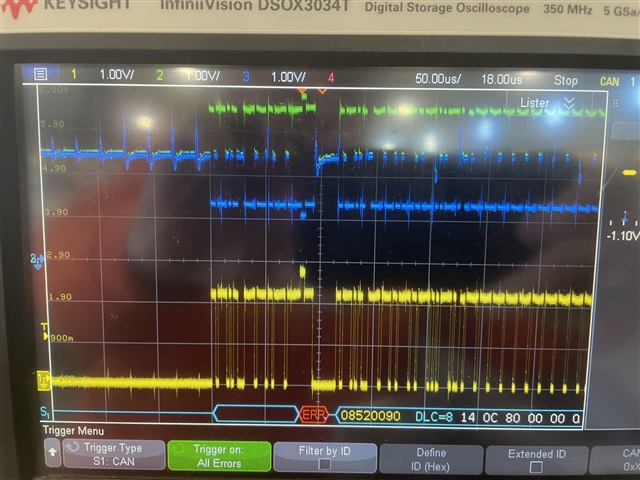
We're at a loss for how this is occurring. We have tried various changes to grounds (CAN ground, Chassis, etc..) with no change in behavior. The DUT is an electromechanical servo actuator that does operate in regenerative modes. The occurrence of CAN errors while in regen mode increases.
We're looking for ideas to try so we can identify the root cause to these CAN Errors.
Thanks!

