Other Parts Discussed in Thread: ISO1228, , ISO1228DFBEVM
Tool/software:
Hi,
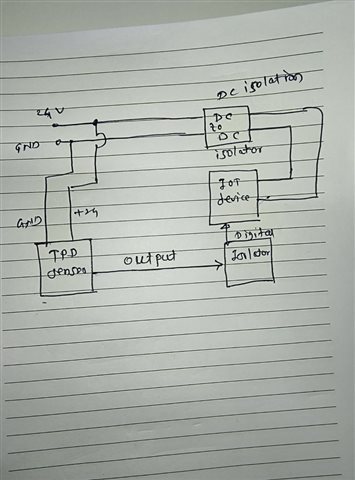
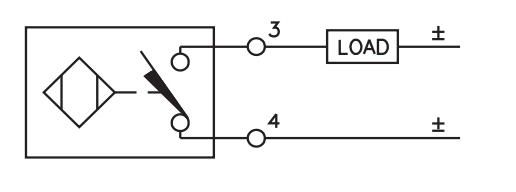
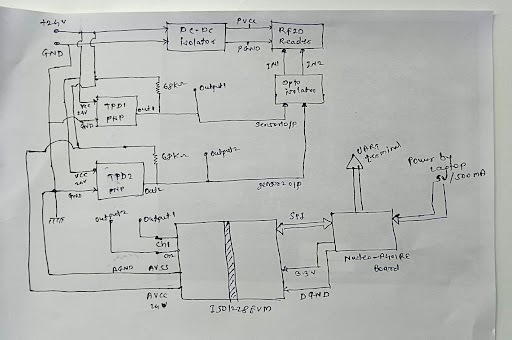
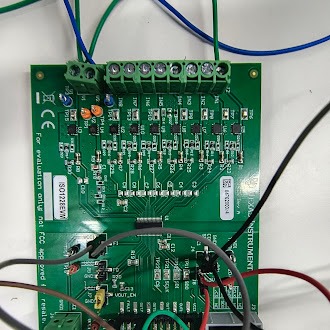
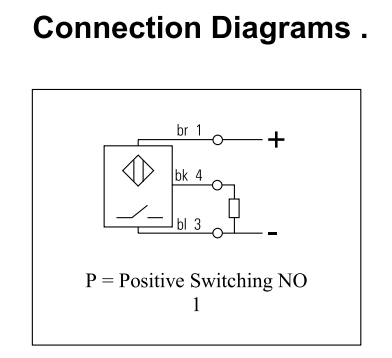
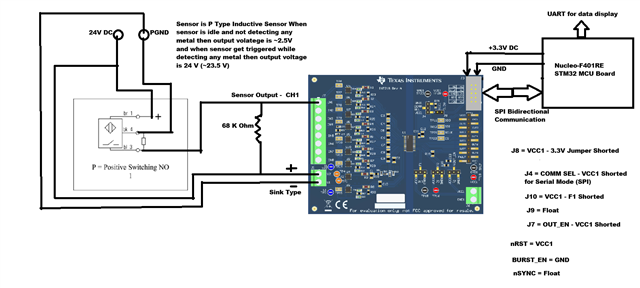
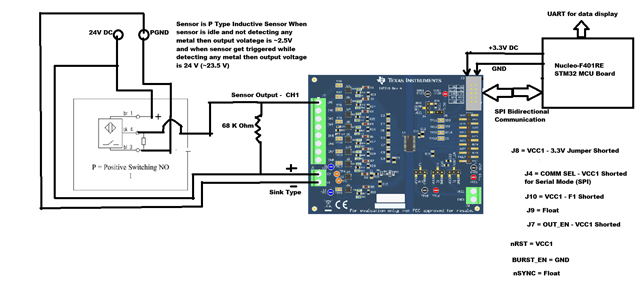
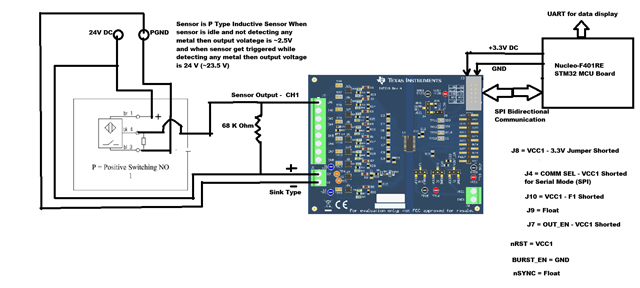
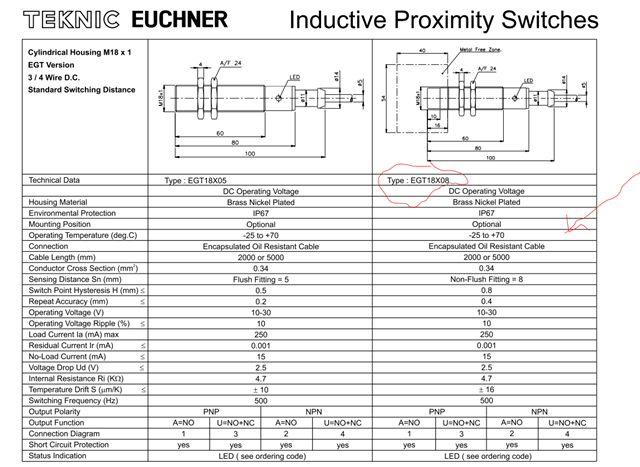
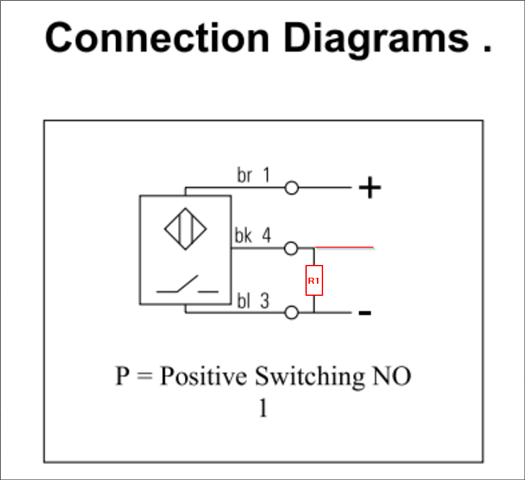
I have inductive TPD PNP sensor, Part No # NI75U-Q80-VP4X1-H1141 connected via Isolator IC as input to IoT device. See the block diagram.
I want to make another Embedded MCU based device to get health of TPD sensor and want to detect fault conditions.
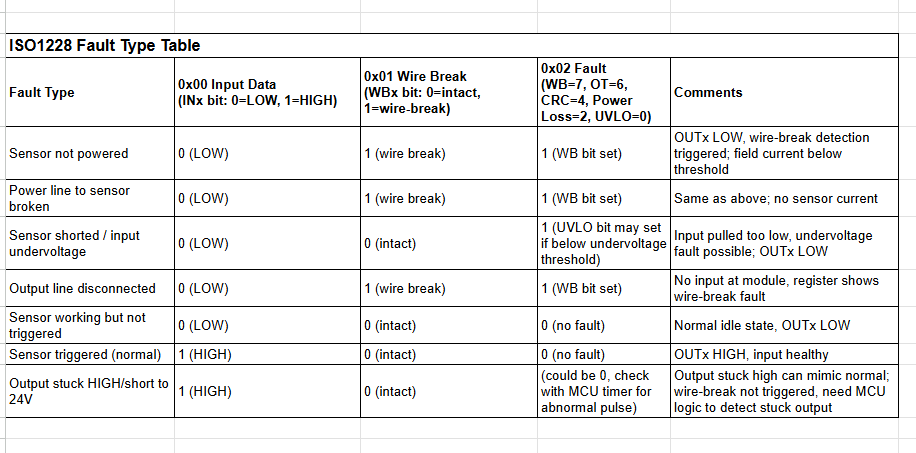
1) Sensor not powered ON
2) Sensor Short
3) Output line/wire break from isolator and floating
there are the three fault conditions for my logic.
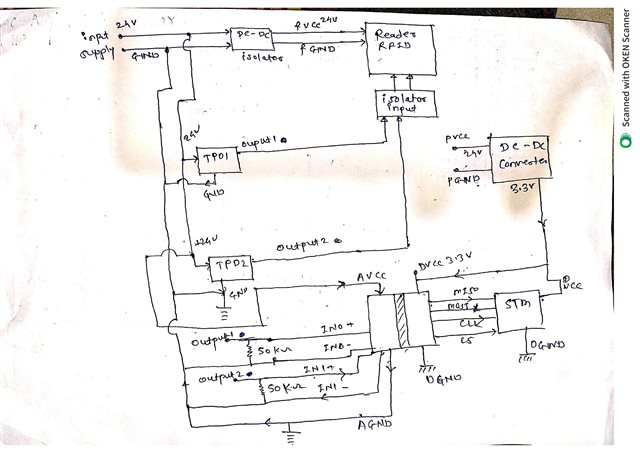
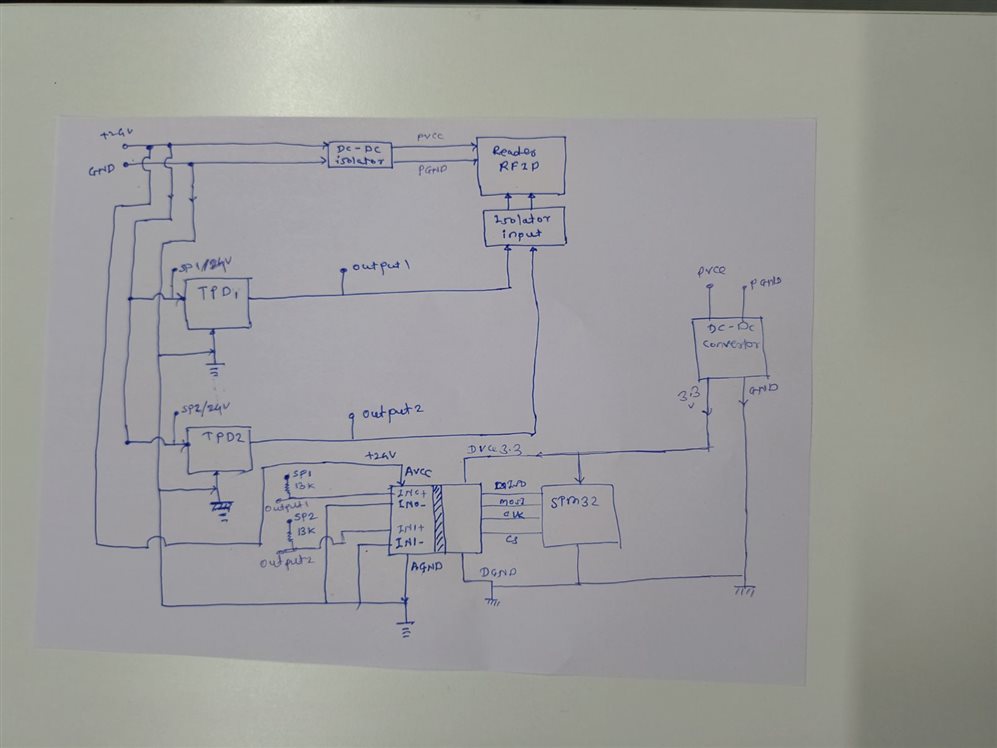
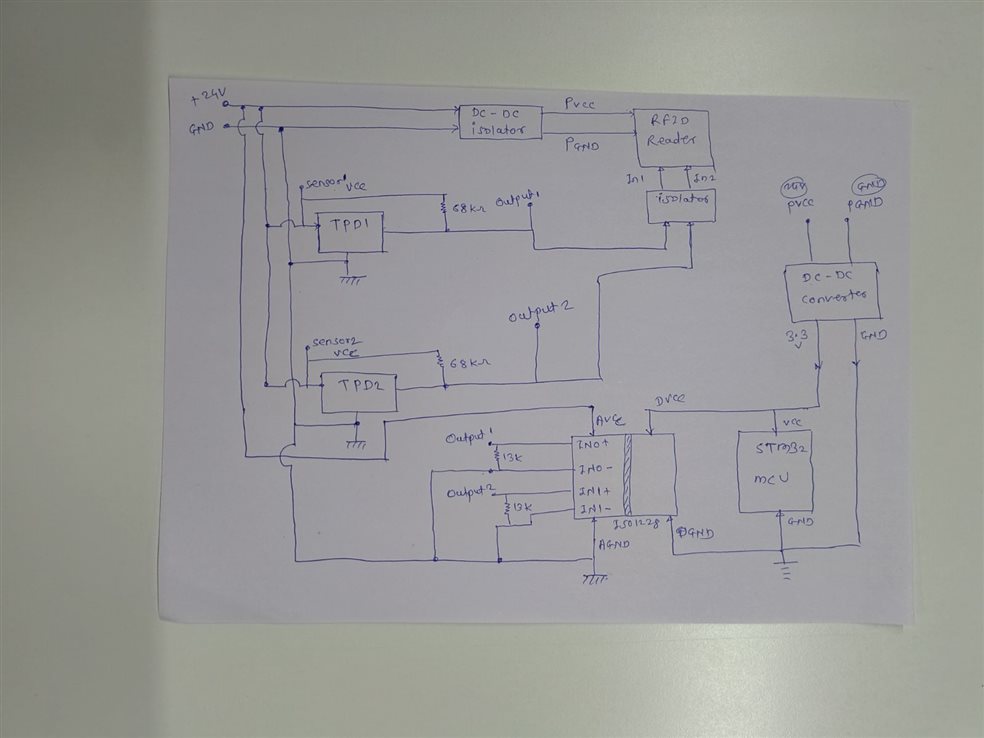
So I want to connect one more mcu based device and want diagnose these details either by power path or output path.
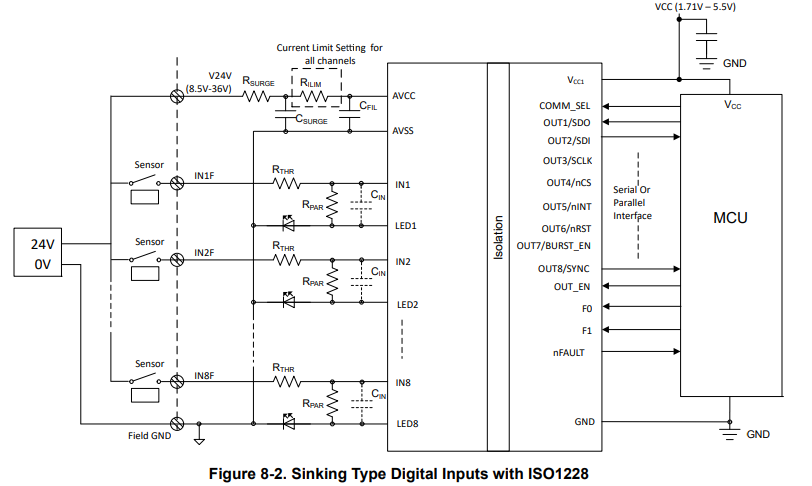
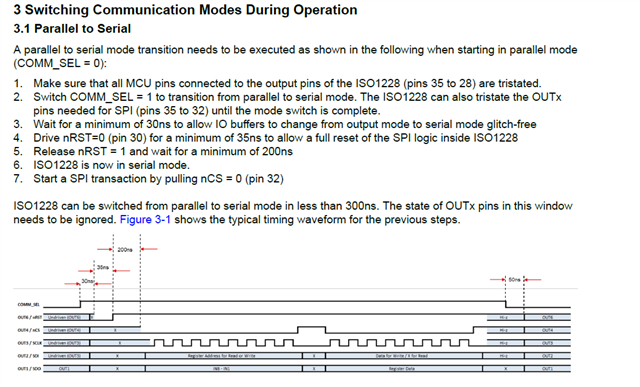
I thinking to use ISO1228 on output line which has output either parallel mode or serial mode which I can use to MCU for analysis. Is it possible
to detect these above mentioned conditions by using this ISO1228?