Tool/software:
I am using the MSP-EXP432E401Y development board.
I modified the line UARTStdioConfig(0, 115200, g_ui32SysClock) in the enet_lwip.c file of the ethernet_with_lwip_MSP-EXP432E401Y code example.
Instead of passing 0, I used 2 to access UART2 of the microcontroller.
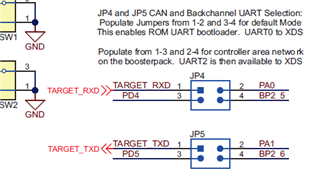
I also removed jumpers JP4 and JP5 to disconnect UART from the debugger, and connected a COM port directly to the UART2 pins (TX, RX, and GND).
However, when I run the code, the terminal does not display any output from the UARTprintf function.
For example, the line UARTprintf("Ethernet lwIP example\n\n"); does not print anything.
When I perform the same procedure using UART0 (as in the original example), the output appears correctly on the terminal.
Is there anything else I need to do to access UART2?