Other Parts Discussed in Thread: C2000WARE, LAUNCHXL-F280049C, AMC1306EVM
Hi
I have changed sdfm_ex5_filter_sync_fifo_cpuread.c under \\ti\c2000\C2000Ware_3_02_00_00\driverlib\f28004x\examples\sdfm to use PWM8 for SYNC signal and PWM1 for SDFM clock.
There are some issues below on this program:
1. When I use SDFM_enableWaitForSync (line 212) to let SDFM waiting for PWM SOCA signal, program cannot enter sdfmFIFO1ISR.
2. When I don't use SDFM_enableWaitForSync, program enters sdfmFIFO1ISR but the entering time is not reasonable:
I set different FIFO_INT_NUM values and I supposed that the conversion time (PWM8.TBCTR) should be bigger if FIFO_INT_NUM increases,
but the times I got don't follow this rule, see the data below (PWM1 offers 10MHz clock):
FIFO_INT_NUM 1st run 2nd run
3 6815 7075
4 6753 6593
5 6793 6665
9 6675 6493
The code lists here for your review:
//###########################################################################
//
// FILE: sdfm_ex5_filter_sync_fifo_cpuread.c
//
// TITLE: SDFM Type 1 Filter FIFO Example.
//
//! \addtogroup driver_example_list
//! <h1> SDFM Type 1 Filter FIFO </h1>
//!
//! This example configures SDFM1 filter to demonstrate data read through
//! CPU in FIFO & non-FIFO mode. Data filter is configured in mode 0
//! to select SINC3 filter with OSR of 256. Filter output is configured
//! for 16-bit format and data shift of 10 is used.
//!
//! This example demonstrates the FIFO usage if enabled. FIFO length is set
//! at 16 and data ready interrupt is configured to be triggered when FIFO is
//! full. In this example, SDFM filter data is read by CPU in SDFM Data Ready
//! ISR routine.
//!
//! \b External \b Connections \n
//! Connect Sigma-Delta streams to (SD-D1, SD-C1 to SD-D4,SD-C4)
//! on GPIO24-GPIO31
//!
//! \b Watch \b Variables \n
//! - \b filter1Result - Output of filter 1
//!
//
//###########################################################################
// $TI Release: F28004x Support Library v1.09.00.00 $
// $Release Date: Thu Mar 19 07:26:52 IST 2020 $
// $Copyright:
// Copyright (C) 2020 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//###########################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include <stdio.h>
#define JIAKAI
//
// Defines
//
#define MAX_SAMPLES 1024
#define FIFO_INT_NUM 9U
#define SDFM_FILTER_ENABLE 0x2U
//
// Macro to enable FIFO mode. Make it zero to disable
// FIFO mode.
//
#define ENABLE_FIFO 1
//
// Globals
//
int16_t filter1Result[MAX_SAMPLES];
#pragma DATA_SECTION(filter1Result, "Filter1_RegsFile");
//
// Function Prototypes
//
void configureSDFMPins(void);
void initEPWM(uint32_t epwmInstance);
//
// ISRs
//
__interrupt void sdfmFIFO1ISR(void);
__interrupt void sdfm1ErrorISR(void);
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Setup GPIO by disabling pin locks and enabling pullups
//
Device_initGPIO();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP5);
Interrupt_register(INT_SDFM1DR1, sdfmFIFO1ISR);
Interrupt_register(INT_SDFM1, sdfm1ErrorISR);
//
// Enable SDFM1 interrupts(Data Ready & Error interrupts)
//
Interrupt_enableMaster();
Interrupt_enable(INT_SDFM1DR1);
Interrupt_enable(INT_SDFM1);
initEPWM(EPWM8_BASE);
//
// Configure GPIO pins as SDFM pins
//
configureSDFMPins();
//
// Input Control Unit
//
// Configure Input Control Unit: Modulator Clock rate = Modulator data rate
//
SDFM_setupModulatorClock(SDFM1_BASE, SDFM_FILTER_1,
SDFM_MODULATOR_CLK_EQUAL_DATA_RATE);
//
// Data Filter Unit
//
// Configure Data Filter Unit - filter type, OSR value and
// enable / disable data filter
//
SDFM_configDataFilter(SDFM1_BASE, (SDFM_FILTER_1 | SDFM_FILTER_SINC_3 |
SDFM_SET_OSR(256)), (SDFM_DATA_FORMAT_16_BIT | SDFM_FILTER_ENABLE |
SDFM_SHIFT_VALUE(0x000A)));
#if (ENABLE_FIFO)
//
// Set data ready interrupt source as fifo interrupt
//
SDFM_setDataReadyInterruptSource(SDFM1_BASE, SDFM_FILTER_1,
SDFM_DATA_READY_SOURCE_FIFO);
//
// Enable FIFO and set the FIFO interrupt level
//
SDFM_enableFIFOBuffer(SDFM1_BASE, SDFM_FILTER_1);
SDFM_setFIFOInterruptLevel(SDFM1_BASE, SDFM_FILTER_1, FIFO_INT_NUM);
SDFM_enableInterrupt(SDFM1_BASE, SDFM_FILTER_1,
(SDFM_FIFO_INTERRUPT | SDFM_FIFO_OVERFLOW_INTERRUPT));
#else
//
// Set data ready interrupt source as fifo interrupt
//
SDFM_setDataReadyInterruptSource(SDFM1_BASE, SDFM_FILTER_1,
SDFM_DATA_READY_SOURCE_DIRECT);
SDFM_enableInterrupt(SDFM1_BASE, SDFM_FILTER_1,
SDFM_DATA_FILTER_ACKNOWLEDGE_INTERRUPT);
#endif
//
// Enable Master filter bit: Unless this bit is set none of the filter
// modules can be enabled. All the filter modules are synchronized when
// master filter bit is enabled after individual filter modules are enabled.
//
SDFM_enableMasterFilter(SDFM1_BASE);
//
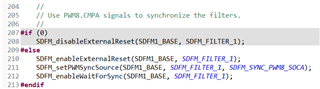
// Use PWM8.CMPA signals to synchronize the filters.
//
#if (0)
SDFM_disableExternalReset(SDFM1_BASE, SDFM_FILTER_1);
#else
SDFM_enableExternalReset(SDFM1_BASE, SDFM_FILTER_1);
SDFM_setPWMSyncSource(SDFM1_BASE, SDFM_FILTER_1, SDFM_SYNC_PWM8_SOCA);
// SDFM_enableWaitForSync(SDFM1_BASE, SDFM_FILTER_1);
#endif
//
// Enable modulator failure interrupt, disable threshold interrupts
//
SDFM_enableInterrupt(SDFM1_BASE, SDFM_FILTER_1,
SDFM_MODULATOR_FAILURE_INTERRUPT);
SDFM_disableInterrupt(SDFM1_BASE, SDFM_FILTER_1,
(SDFM_HIGH_LEVEL_THRESHOLD_INTERRUPT |
SDFM_LOW_LEVEL_THRESHOLD_INTERRUPT));
//
// Enable master interrupt so that any of the filter interrupts can trigger
// by SDFM interrupt to CPU
//
SDFM_enableMasterInterrupt(SDFM1_BASE);
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
//
// Wait for an interrupt
//
while(1);
}
//
// sdfm1ErrorISR - SDFM1 Error ISR
//
__interrupt void sdfm1ErrorISR(void)
{
//
// Clear SDFM flag register (SDIFLG)
//
SDFM_clearInterruptFlag(SDFM1_BASE, SDFM_MASTER_INTERRUPT_FLAG |
0xFFFF);
//
// Acknowledge this interrupt to receive more interrupts from group 5
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP5);
}
#define PWM_TBCTR(_p) *((uint16_t *)(0x3F04 + 0x100 * (_p)))
int index = 0;
uint16_t tmBuf[100];
//
// sdfmFIFO1ISR - SDFM FIFO1 ISR
//
__interrupt void sdfmFIFO1ISR(void)
{
uint16_t i;
static uint16_t loopCounter1 = 0;
#if (0)
SDFM_setOutputDataFormat(SDFM1_BASE, SDFM_FILTER_1,
SDFM_DATA_FORMAT_16_BIT);
#endif
//
// Read SDFM flag register (SDIFLG)
//
if(loopCounter1 >= MAX_SAMPLES)
{
ESTOP0;
}
else if(SDFM_getFIFOISRStatus(SDFM1_BASE, SDFM_FILTER_1) == 0x1U)
{
tmBuf[index] = PWM_TBCTR(8); if (++index >= 100) index = 0;
for(i = 0; i < FIFO_INT_NUM; i++)
{
filter1Result[loopCounter1++] =
(int16_t)(SDFM_getFIFOData(SDFM1_BASE,
SDFM_FILTER_1) >> 16U);
}
}
else if(SDFM_getNewFilterDataStatus(SDFM1_BASE, SDFM_FILTER_1) == 0x1U)
{
filter1Result[loopCounter1++] =
(int16_t)(SDFM_getFilterData(SDFM1_BASE, SDFM_FILTER_1) >> 16U);
}
//
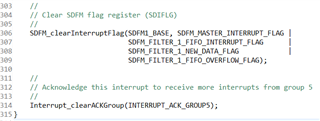
// Clear SDFM flag register (SDIFLG)
//
SDFM_clearInterruptFlag(SDFM1_BASE, SDFM_MASTER_INTERRUPT_FLAG |
SDFM_FILTER_1_FIFO_INTERRUPT_FLAG |
SDFM_FILTER_1_NEW_DATA_FLAG |
SDFM_FILTER_1_FIFO_OVERFLOW_FLAG);
//
// Acknowledge this interrupt to receive more interrupts from group 5
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP5);
}
//
// configureSDFMPins - Configure SDFM GPIOs
//
void configureSDFMPins(void)
{
uint16_t pin;
#ifdef JIAKAI
for(pin = 16; pin <= 17; pin++)
{
// GPIO_setDirectionMode(pin, GPIO_DIR_MODE_IN);
GPIO_setMasterCore(pin, GPIO_CORE_CPU1);
GPIO_setPadConfig(pin, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(pin, GPIO_QUAL_ASYNC);
}
GPIO_setPinConfig(GPIO_16_SD_D1);
GPIO_setPinConfig(GPIO_17_SD_C1);
#else
for(pin = 24; pin <= 31; pin++)
{
GPIO_setDirectionMode(pin, GPIO_DIR_MODE_IN);
GPIO_setMasterCore(pin, GPIO_CORE_CPU1);
GPIO_setPadConfig(pin, GPIO_PIN_TYPE_STD);
GPIO_setQualificationMode(pin, GPIO_QUAL_ASYNC);
}
//
// Configure GPIO16-GPIO31 as SDFM pins
//
GPIO_setPinConfig(GPIO_24_SD_D1);
GPIO_setPinConfig(GPIO_25_SD_C1);
GPIO_setPinConfig(GPIO_26_SD_D2);
GPIO_setPinConfig(GPIO_27_SD_C2);
GPIO_setPinConfig(GPIO_28_SD_D3);
GPIO_setPinConfig(GPIO_29_SD_C3);
GPIO_setPinConfig(GPIO_30_SD_D4);
GPIO_setPinConfig(GPIO_31_SD_C4);
#endif
}
//
// initEPWM - Initialize specified EPWM settings
//
void initEPWM(uint32_t epwmInstance)
{
//
// Disable sync(Freeze clock to PWM as well)
//
SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
//
// Setup TBCLK: Configure timer period = 801 TBCLKs, phase = 0 &
// clear counter
//
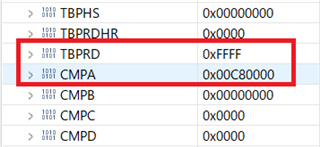
EPWM_setTimeBasePeriod(epwmInstance, 0xFFFF);
EPWM_setPhaseShift(epwmInstance, 0U);
EPWM_setTimeBaseCounter(epwmInstance, 0U);
//
// Set CMPA value
//
EPWM_setCounterCompareValue(epwmInstance, EPWM_COUNTER_COMPARE_A, 200U);
//
// Setup counter mode
//
EPWM_setTimeBaseCounterMode(epwmInstance, EPWM_COUNTER_MODE_UP);
EPWM_setClockPrescaler(epwmInstance,
EPWM_CLOCK_DIVIDER_1,
EPWM_HSCLOCK_DIVIDER_1);
//
// Set actions:
// Toggle PWMxA on event A, up-count
// Toggle PWMxB on event A, up-count
//
GPIO_setPadConfig(0, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_0_EPWM1A);
GPIO_setPadConfig(1, GPIO_PIN_TYPE_STD);
GPIO_setPinConfig(GPIO_1_EPWM1B);
EPWM_setTimeBasePeriod(EPWM1_BASE, 4); // PWM1 period: 0.1us
EPWM_setTimeBaseCounterMode(EPWM1_BASE, EPWM_COUNTER_MODE_UP);
EPWM_setClockPrescaler(EPWM1_BASE,
EPWM_CLOCK_DIVIDER_1,
EPWM_HSCLOCK_DIVIDER_1);
EPWM_setActionQualifierAction(EPWM1_BASE,
EPWM_AQ_OUTPUT_A,
EPWM_AQ_OUTPUT_TOGGLE,
EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
// EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPA);
EPWM_setActionQualifierAction(EPWM1_BASE,
EPWM_AQ_OUTPUT_B,
EPWM_AQ_OUTPUT_TOGGLE,
EPWM_AQ_OUTPUT_ON_TIMEBASE_PERIOD);
// EPWM_AQ_OUTPUT_ON_TIMEBASE_UP_CMPB);
#ifndef JIAKAI
//
// Configure SOCA signal
//
//
EPWM_setADCTriggerSource(EPWM1_BASE, EPWM_SOC_A, EPWM_SOC_TBCTR_U_CMPA);
EPWM_setADCTriggerEventPrescale(EPWM1_BASE, EPWM_SOC_A, 1);
#endif
//
// Enable sync and clock to PWM
//
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
}
//
// End of file
//
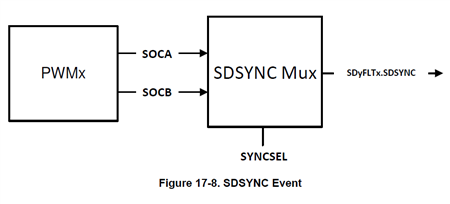
Could anyone teach me how to use PWM SOCA/B to synch SDFM?
thanks,
Jiakai