Other Parts Discussed in Thread: C2000WARE
Hi Team,
Sorry to bother you.I am currently testing the code of TIDM-02007. The level 1 test has been completed.But I found a new problem when testing LEVEL2.
I set up Level2 according to the instructions, and found that it is normal during the alignment start process, and then the motor will shake.
The current and voltage waveforms at the beginning of the start-up are normal, and the current waveforms are abnormal afterwards:
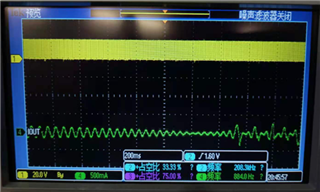
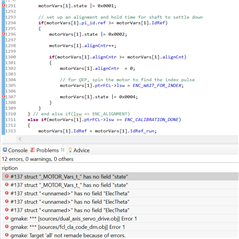
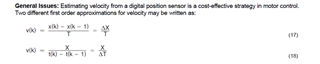
I checked the signal and found that in the ABI signal of my motor, the AB signal is normal, but the I signal is always high (5v), and the speed feedback signal Speed.Speed is also abnormal

my question is:
1. In the state of level2, if the correct I (ABI) signal cannot be obtained, will it cause the motor to run abnormally? (Or will it be related to the setting of the motor parameters?) What is your comment on this wrong current waveform?
2. If the motor cannot get the correct I signal, can it not normally run the motor such as level 4 in a closed loop (my understanding is that it will always be in the ENC_WAIT_FOR_INDEX state)
Thanks
Jenson.