


Part Number: TMDSECATCNCD379D
Other Parts Discussed in Thread: C2000WARE, TMDSCNCD28379D
Hi,
I want to generate 20 MHz SPI CLK frequency. I am doing the calculation as follows.
// // Calculate BRR: 7-bit baud rate register value // SPI CLK freq = 500 kHz // LSPCLK freq = CPU freq / 4 (by default) // BRR = (LSPCLK freq / SPI CLK freq) - 1 // #if CPU_FRQ_200MHZ #define SPI_BRR ((200E6 / 4) / 20E6) - 1 // 20MHz CLK Signal. #endif
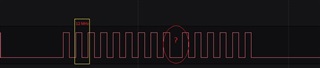
However, when I look at the signal with the logic analyzer, the CLK signal looks wrong. I marked the CLK signal output picture with yellow and red lines.
Yellow line in the image = SPI CLK signal is 12 MHz.
Red line in the image = 8 MHz field.

I am using the example below.
C:\ti\c2000\C2000Ware_3_04_00_00\device_support\f2837xd\examples\cpu1\spi_loopback
Is there an error in the calculation process?
Sinan,
Thanks and Best regards.





