Other Parts Discussed in Thread: CONTROLSUITE, MOTORWARE
Hi everyone
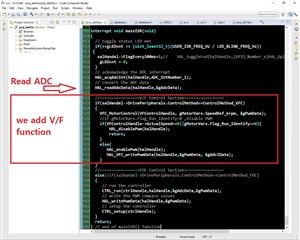
I am using C:\ti\controlSUITE2_DMC Rev\development_kits\HVMotorCtrl+PfcKit_v2.1\HVACI_Scalar
I am trying to have the current of motor (like all of VFD's which they can display).
because in V/F control method we don't have theta value of motor so we can not use this equation.
// read Id and Iq vectors in amps
gMotorVars.Id_A = _IQmpy(CTRL_getId_in_pu(ctrlHandle), _IQ(USER_IQ_FULL_SCALE_CURRENT_A));
gMotorVars.Iq_A = _IQmpy(CTRL_getIq_in_pu(ctrlHandle), _IQ(USER_IQ_FULL_SCALE_CURRENT_A));
// calculate vector Is in amps
gMotorVars.Is_A = _IQsqrt(_IQmpy(gMotorVars.Id_A, gMotorVars.Id_A) + _IQmpy(gMotorVars.Iq_A, gMotorVars.Iq_A));
so my question is how to get Motor Current ?
is that ok if I calculate it such a way?
Ia,Ib,Ic into CLARKE transformation so we will have I_alpha and I_beta
and we calculate
MotorCurrent = Sqrt((I_alpha *I_alpha ) +(I_beta *I_beta ));
shall we do that?
please help me to understand how to get Motor Current (like all of VFD's) ?
thanks for attention.
Dave.