Part Number: TMS320F28069M
Hi, TI-team.
I'm working on TMS320F28069M with DRV8316R for drive BLDC (SPMSM) motor.
The app-note I refer is sprabq4.pdf.
I have a problem when switching the motor from torque control (current control) to speed control.
In other words, when switch control from open-loop to closed loop. Or vice versa.
Motor stops when switch control.
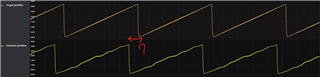
Perhaps the problem is the phase between the measured position theta and the target position theta.

I want to know, what is the ideal phase difference between the two thetas?
The app-note says that it is a little delay, but not switch well.
The app-note says that it is a little delay, but not switch well.