Other Parts Discussed in Thread: MOTORWARE,
I am running custom motor drive hardware using the TMS320F28027F and DRV8323S using firmware similar to motorware/instaspin lab5b. The speed response feels pretty well tuned and stable.
The test I'm running is to drive the motor at a constant speed, 1500 RPM or so, about midrange, and gradually increase load torque.
With the USER_MOTOR_MAX_CURRENT constant set to 8.0, as the command current reaches that value, the motor gradually and gracefully slows, as desired.
With USER_MOTOR_MAX_CURRENT set to ~12.0, once the motor reaches 8-10A current consumption, it stops suddenly with a jolt. The driver hardware used should be able to support over 50A of phase current.
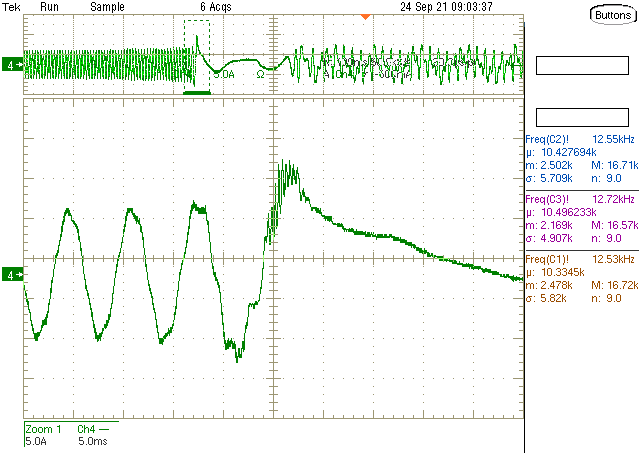
I've attached a phase current waveform at the time of stall.
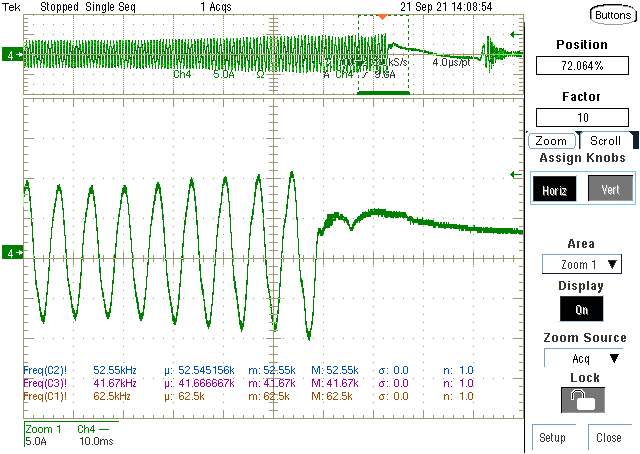
Any idea what's happening or what I should look for?