Other Parts Discussed in Thread: BOOSTXL-3PHGANINV, TMS320F28069, INA240, C2000WARE, MOTORWARE
Dear team:
My customer uses boostxl-3phganinv and launchpad tms320f28069 for motor control experiments.
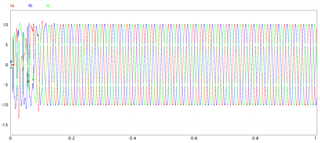
When the input voltage is 24v, 1.5A, and the output voltage is 9V and 1.5A, the motor is blocked.
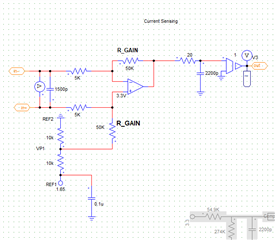
The customer believes that the main problem lies in the current sensing construction based on the circuit schematic simulation modeling of boostxl-3phganinv.

The internal circuit of INA240 is as follows:
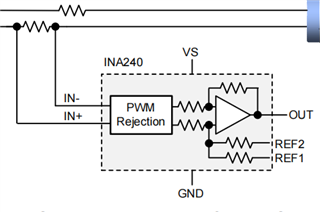
The customer cannot know the resistance value of each resistor in the above figure. Maybe the resistance value set in the simulation is wrong, which causes the output value of the current detection amplifier to exceed the range of 0-3.3v allowed by the ADC conversion.
Can you help determine if there is a problem with the hardware?
Best regards