


Part Number: TMS320F28035
Hello everyone,
I am using a modified version of TI’s Sensored FOC for PMSM project, and have encountered some difficulties setting the PI controller gains for my motor control current feedback loops.
I have started with using Dave Wilson’s “Teaching Your PI Controller to Behave” series for calculating the current loop gains.
Starting with calculating Kb using the following equation

using R = 0.2Ω for stator resistance and L = 1.36mH for motor inductance, I get Kb = 147.06.
I then, using a 10KHz loop bandwidth (62832 rad/s), calculate Ka using the following equation

Using the same 1.36mH motor inductance value, I get Ka = 85.45.
Given Ka = Kp, this gives Kp = 85.45, and given that Ki = Kp * Kb, this gives a Ki value of 12566.277
Given my max full scale current from my AC current sensors (600 Amp) and my DC bus voltage of 300V, with a switching period of 10KHz, I have converted these values to per unit using the equations
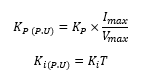
Finally, this gives me a per-unit Kp value of 170.9 and a Ki value of 1.2566. These values are much too high to operate the motor at all, let alone in a stable region.
Any advice on where I am going wrong in my calculations will be greatly appreciated. I have tried ‘guess-and-check’ methodology for tuning these controllers to no avail, so following the proper control systems approach outlined by Dave Wilson will be very helpful to my team and I.
Best Regards,
Graison
