


Part Number: TMS320F28374D
Hi experts,
My customer encountered an issue about global load. Here are his settings:
1. EPWM1, EPWM2, EPWM7, EPWM8 is one group;
2. Counter: Up-Mode;
3.Enable the shadow mode of TBPRD 、CMPA、CMPB;
4. Enable global mode of TBPRD_TBPRDHR、CMPA_CPMAHR、CMPB_CMPBHR、AQCTLA_AQCTLA2、AQCTLB_AQCTLB2;
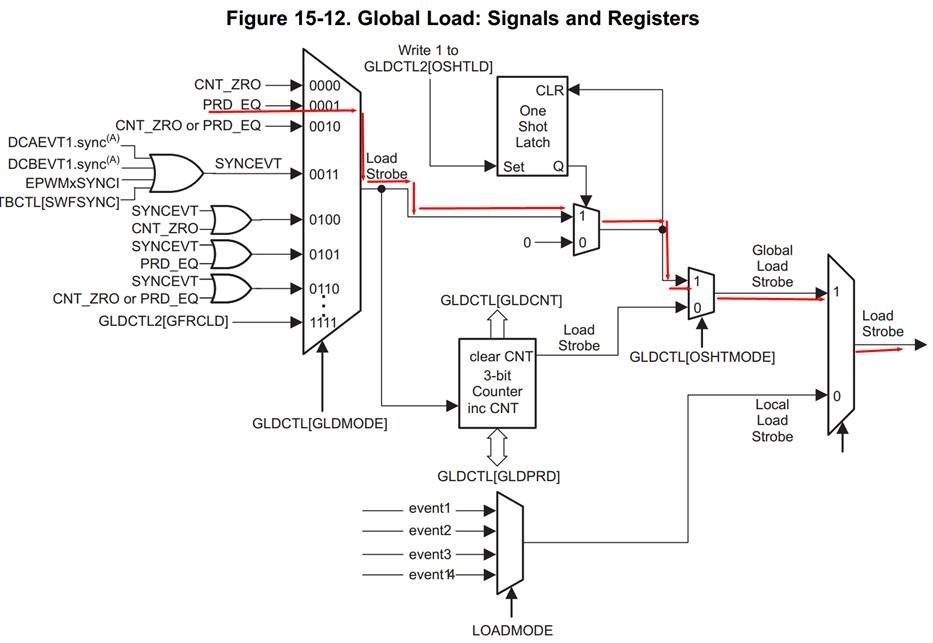
5. Global load in CNT=PRD;
6. Enable OSHTMODE of Global load;
In his application, he need to change AQCTLA of EPWM7, EPWM8, from ZRO↑, CAU↑, CBU↓ change to ZRO↓, CAU↑, CBU↓. But there randomly occurs when the ZRO should be set low, but remains high, as follows:

As shown in the figure above: At the second CNT=PRD, AQCTLx, TBPRD, CMPA, CMPB are updated. So at the second CNT=ZRO, It should be a pull-down drive, but the result is still keeping high.
Please help on this issue, thank you!



