


Other Parts Discussed in Thread: TMDSADAP180TO100,
I am currently running our 1 HP motor on TI’s HV kit with the use of Universal Motor Control Project. We are facing one problem in Level 3 build.
Our observations are as follows:
- Motor is running at reference speed in open loop
- The estimated /feedback speed is not stable. The value of actual speed is fluctuating.
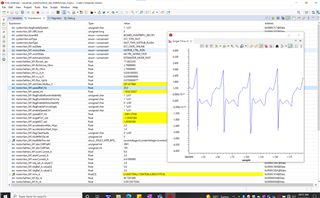
- Angle estimated by FAST Observer is also not stable.
P.S: Graph shows the Estimator Angle using the Data log feature.
I request you to help us in resolving this issue.
Note: I did went to Build Level 4 and tried to run motor but then module over current fault along with phase lost faults comes. This is must be due to bad feedback signal from observer.
