


Part Number: TMS320F28069M
Other Parts Discussed in Thread: CONTROLSUITE,
Hello Everyone,
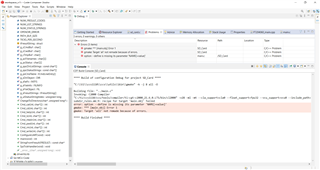
I am trying to flash the code of SD card located at "C:\ti\controlSUITE\device_support\F2837xS\v200\F2837xS_examples_Cpu1\sd_card\cpu01" on TMS320F28069M. But while debugging the code I am facing below error (Fig. 1)
I have included all the necessary paths as shown in fig2:

Please help me out with this error.
Thank you so much in advance!!


