Part Number: LVSERVOMTR
Hello,
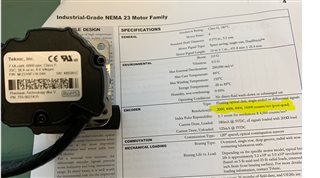
i got the DRV8301-69M-KIT and LVSERVOMTR motor (verified to be Teknic_M2310PLN04K).
i redid lab 1b and 5e to make sure the wire connection and system ran correctly.
my connection is: Teknic T (white) connects to A on DRV8301-69M-KIT, Teknic R (black) connects to B on DRV8301-69M-KIT, and Teknic S (red) connects to C on DRV8301-69M-KIT.
all good. i can spin the motor and adjust the speed.
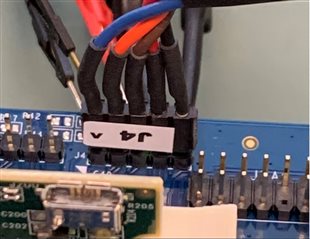
then, i redo lab 12a by connecting the J4 of the Teknic cable to the DRV8301-69M-KIT J4 terminal, see picture below.

some snap shot of my user.h:

i am running 60v on this motor which i think it works fine on lab 1b and 5e.
#define USER_IQ_FULL_SCALE_VOLTAGE_V (60.0)
#define USER_IQ_FULL_SCALE_CURRENT_A (41.25)
#define USER_SYSTEM_FREQ_MHz (90.0)
#define USER_PWM_FREQ_kHz (10.0)
the motor does not run when i adjust to non-zero speed.
the lab supply current jumped to 0.65A and motor stalled.
i am not sure what's going on yet.
i ran DRV8301-69M-KIT with my custom motor in InstacMotion control and things worked fine.
i bought a new set of DRV8301-69M-KIT and LVSERVOMTR motor for dynamometer purpose and would like to check out the motion control, but it does not work.
i have no clue now.
can you please shine some lights?
Best Regards,
henry