Hi,
1.I want to use interrupt line 1(CAN1INT) in DCAN module, and I have tried to modify the program(can_ex2_loopback_interrupt), but it didn't generate CAN1INT. Can you help me? The modifed file is in the attachment.//#############################################################################
//
// FILE: can_ex2_loopback_interrupts.c
//
// TITLE: CAN External Loopback with Interrupts Example
//
//! \addtogroup driver_example_list
//! <h1> CAN External Loopback with Interrupts </h1>
//!
//! This example shows the basic setup of CAN in order to transmit and receive
//! messages on the CAN bus. The CAN peripheral is configured to transmit
//! messages with a specific CAN ID. A message is then transmitted once per
//! second, using a simple delay loop for timing. The message that is sent is
//! a 4 byte message that contains an incrementing pattern. A CAN interrupt
//! handler is used to confirm message transmission and count the number of
//! messages that have been sent.
//!
//! This example sets up the CAN controller in External Loopback test mode.
//! Data transmitted is visible on the CANTXA/CANATX pin and is received internally
//! back to the CAN Core.
//!
//! \b External \b Connections \n
//! - None.
//!
//! \b Watch \b Variables \n
//! - txMsgCount - A counter for the number of messages sent
//! - rxMsgCount - A counter for the number of messages received
//! - txMsgData - An array with the data being sent
//! - rxMsgData - An array with the data that was received
//! - errorFlag - A flag that indicates an error has occurred
//!
//
//#############################################################################
// $TI Release: F28004x Support Library v1.11.00.00 $
// $Release Date: Sun Oct 4 15:49:15 IST 2020 $
// $Copyright:
// Copyright (C) 2020 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
//
// Defines
//
#define MSG_DATA_LENGTH 4
#define TX_MSG_OBJ_ID 1
#define RX_MSG_OBJ_ID 2
//
// Globals
//
volatile uint32_t txMsgCount = 0;
volatile uint32_t rxMsgCount = 0;
volatile uint32_t errorFlag = 0;
uint16_t txMsgData[4];
uint16_t rxMsgData[4];
//
// Function Prototypes
//
__interrupt void canISR(void);
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Initialize GPIO and configure GPIO pins for CANTX/CANRX
//
Device_initGPIO();
GPIO_setPinConfig(DEVICE_GPIO_CFG_CANRXA);
GPIO_setPinConfig(DEVICE_GPIO_CFG_CANTXA);
//
// Initialize the CAN controller
//
CAN_initModule(CANA_BASE);
//
// Set up the CAN bus bit rate to 500kHz
// Refer to the Driver Library User Guide for information on how to set
// tighter timing control. Additionally, consult the device data sheet
// for more information about the CAN module clocking.
//
CAN_setBitRate(CANA_BASE, DEVICE_SYSCLK_FREQ, 500000, 20);
//
// Enable interrupts on the CAN peripheral.
//
CAN_enableInterrupt(CANA_BASE, CAN_INT_IE0 | CAN_INT_ERROR |
CAN_INT_STATUS);
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
//
// Interrupts that are used in this example are re-mapped to
// ISR functions found within this file.
// This registers the interrupt handler in PIE vector table.
//
Interrupt_register(INT_CANA1, &canISR);
//
// Enable the CAN interrupt signal
//
Interrupt_enable(INT_CANA1);
CAN_enableGlobalInterrupt(CANA_BASE, CAN_GLOBAL_INT_CANINT1);
HWREG(CANA_BASE + CAN_O_IP_MUX21) = 0xFFFFFFFF;
//
// Enable CAN test mode with external loopback
//
CAN_enableTestMode(CANA_BASE, CAN_TEST_EXL);
//
// Initialize the transmit message object used for sending CAN messages.
// Message Object Parameters:
// Message Object ID Number: 1
// Message Identifier: 0x1
// Message Frame: Standard
// Message Type: Transmit
// Message ID Mask: 0x0
// Message Object Flags: Transmit Interrupt
// Message Data Length: 4 Bytes
//
CAN_setupMessageObject(CANA_BASE, TX_MSG_OBJ_ID, 0x1, CAN_MSG_FRAME_STD,
CAN_MSG_OBJ_TYPE_TX, 0, CAN_MSG_OBJ_TX_INT_ENABLE,
MSG_DATA_LENGTH);
//
// Initialize the receive message object used for receiving CAN messages.
// Message Object Parameters:
// Message Object ID Number: 2
// Message Identifier: 0x1
// Message Frame: Standard
// Message Type: Receive
// Message ID Mask: 0x0
// Message Object Flags: Receive Interrupt
// Message Data Length: 4 Bytes
//
CAN_setupMessageObject(CANA_BASE, RX_MSG_OBJ_ID, 0x1, CAN_MSG_FRAME_STD,
CAN_MSG_OBJ_TYPE_RX, 0, CAN_MSG_OBJ_RX_INT_ENABLE,
MSG_DATA_LENGTH);
//
// Initialize the transmit message object data buffer to be sent
//
txMsgData[0] = 0x12;
txMsgData[1] = 0x34;
txMsgData[2] = 0x56;
txMsgData[3] = 0x78;
//
// Start CAN module operations
//
CAN_startModule(CANA_BASE);
//
// Loop Forever - A new message will be sent once per second.
//
for(;;)
{
//
// Check the error flag to see if errors occurred
//
if(errorFlag)
{
Example_Fail = 1;
asm(" ESTOP0");
}
//
// Verify that the number of transmitted messages equal the number of
// messages received before sending a new message
//
if(txMsgCount == rxMsgCount)
{
CAN_sendMessage(CANA_BASE, TX_MSG_OBJ_ID, MSG_DATA_LENGTH,
txMsgData);
Example_PassCount++;
}
else
{
errorFlag = 1;
}
//
// Delay 1 second before continuing
//
DEVICE_DELAY_US(1000000);
//
// Increment the value in the transmitted message data.
//
txMsgData[0] += 0x01;
txMsgData[1] += 0x01;
txMsgData[2] += 0x01;
txMsgData[3] += 0x01;
//
// Reset data if exceeds a byte
//
if(txMsgData[0] > 0xFF)
{
txMsgData[0] = 0;
}
if(txMsgData[1] > 0xFF)
{
txMsgData[1] = 0;
}
if(txMsgData[2] > 0xFF)
{
txMsgData[2] = 0;
}
if(txMsgData[3] > 0xFF)
{
txMsgData[3] = 0;
}
}
}
//
// CAN ISR - The interrupt service routine called when a CAN interrupt is
// triggered. It checks for the cause of the interrupt, and
// maintains a count of all messages that have been transmitted.
//
__interrupt void
canISR(void)
{
uint32_t status;
//
// Read the CAN interrupt status to find the cause of the interrupt
//
status = CAN_getInterruptCause(CANA_BASE);
//
// If the cause is a controller status interrupt, then get the status
//
if(status == CAN_INT_INT0ID_STATUS)
{
//
// Read the controller status. This will return a field of status
// error bits that can indicate various errors. Error processing
// is not done in this example for simplicity. Refer to the
// API documentation for details about the error status bits.
// The act of reading this status will clear the interrupt.
//
status = CAN_getStatus(CANA_BASE);
//
// Check to see if an error occurred.
//
if(((status & ~(CAN_STATUS_TXOK | CAN_STATUS_RXOK)) != 7) &&
((status & ~(CAN_STATUS_TXOK | CAN_STATUS_RXOK)) != 0))
{
//
// Set a flag to indicate some errors may have occurred.
//
errorFlag = 1;
}
}
//
// Check if the cause is the transmit message object 1
//
else if(status == TX_MSG_OBJ_ID)
{
//
// Getting to this point means that the TX interrupt occurred on
// message object 1, and the message TX is complete. Clear the
// message object interrupt.
//
CAN_clearInterruptStatus(CANA_BASE, TX_MSG_OBJ_ID);
//
// Increment a counter to keep track of how many messages have been
// sent. In a real application this could be used to set flags to
// indicate when a message is sent.
//
txMsgCount++;
//
// Since the message was sent, clear any error flags.
//
errorFlag = 0;
}
//
// Check if the cause is the receive message object 2
//
else if(status == RX_MSG_OBJ_ID)
{
//
// Get the received message
//
CAN_readMessage(CANA_BASE, RX_MSG_OBJ_ID, rxMsgData);
//
// Getting to this point means that the RX interrupt occurred on
// message object 2, and the message RX is complete. Clear the
// message object interrupt.
//
CAN_clearInterruptStatus(CANA_BASE, RX_MSG_OBJ_ID);
//
// Increment a counter to keep track of how many messages have been
// received. In a real application this could be used to set flags to
// indicate when a message is received.
//
rxMsgCount++;
//
// Since the message was received, clear any error flags.
//
errorFlag = 0;
}
//
// If something unexpected caused the interrupt, this would handle it.
//
else
{
//
// Spurious interrupt handling can go here.
//
}
//
// Clear the global interrupt flag for the CAN interrupt line
//
CAN_clearGlobalInterruptStatus(CANA_BASE, CAN_GLOBAL_INT_CANINT1);
//
// Acknowledge this interrupt located in group 9
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}
//
// End of File
//
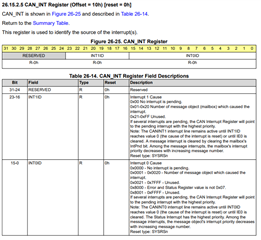
2. If the CAN1INT is effective, was the INT0ID bits in CAN_INT register never 0x8000?
Thanks!