Other Parts Discussed in Thread: BOOSTXL-3PHGANINV
Hi All,
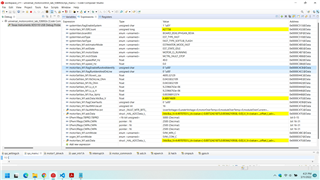
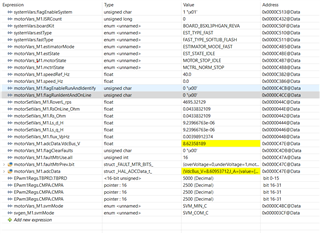
Universal Motor control Lab example is not working for me. As per the lab guide if we run the project ISRCount will start incrementing, but in my case ISRCOunt value never increment. ISRCount value is always 0.
When I enable the flag motorVars_M1.flagEnableRunAndIdentity and motorVars_M1.flagRunIdentAndOnline, I can hear a low jerk coming from the motor and the motor stopped. So the motor never runs. Please find the attached screenshot of Expressions while debugging.
I am following the Universal Motor control Lab example (https://www.ti.com/lit/ug/spruj26/spruj26.pdf?ts=1646903130274&ref_url=https%253A%252F%252Fwww.google.com%252F).
Kindly help us in resolving this problem.
Using the following setup.
Microcontroller: LAUNCHXL-F280025C
Three-Phase Inverter: BOOSTXL-3PHGANINV.
BLDC Motor: - A2212/10t 1400kv pole (https://www.electronicscomp.com/a2212-1400kv-bldc-brushless-motor-india?gclid=CjwKCAiA4KaRBhBdEiwAZi1zzmCG-O5QAFdqtUwTfEoxwtehzcsvtye4xoZ9V1RLIvtBmQe7jIeFgBoC3ZsQAvD_BwE)
Thanks & Regards,
Akash