


Other Parts Discussed in Thread: BOOSTXL-3PHGANINV, INA240, MOTORWARE, DRV8301
Hi team,
Here's an issue from the customer may need your help:
Regarding BOOST'XL-DRV8301, the detection resistance of the three-phase current is located between the lower bridge arm drive tube and GND:

The check amplifier is designed as follows:

The sense resistor P is connected to the negative side of the amplifier and the resistance N is connected to the positive side of the amplifier, which is the negative polarity connection. As described in the InstaSPIN documentation:
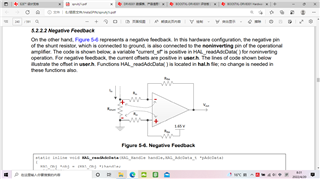
The code is as follows:
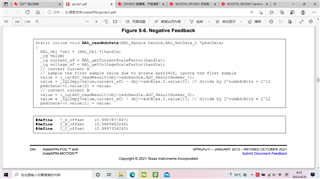
As above, although it's negative polarity connection, the offset of the current is positive and the HAL_getCurrentScaleFactor is positive.
1) If the above hardware circuit design and software calculations are used, the acquired phase current phase should be in the same direction as the motor phase current. Is that correct?
2) The negative polarity connection method is used because the sense resistor is between the lower bridge arm drive tube and GND, and the current flowing through the resistor is flowing from each phase winding, that is, the current flowing through the resistor is 180 degrees from the phase of the motor phase current, so the negative polarity connection method is used. So the polarity of the sense signal from the amplifier output is the same as the motor phase current. Is that right?
3) The typical application for detecting motor phase current using the INA240A1 in the BOOSTXL-3PHGANINV development kit is shown in the following figure:
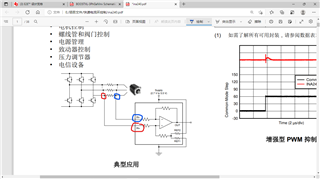
As seen in the figure above, the sample resistor is connected in a three-phase winding in a different way than the sample resistor is connected in a string between the lower bridge arm and GND. So the positive feedback connection is used in the typical application diagram here. However, the INA240 in BOOSTXL-3PHGANINV uses a negative feedback connection, as shown in the following figure:
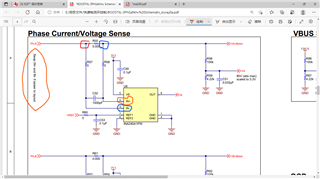
The sampling resistors are connected in parallel in each phase of the motor. Why still use a negative polarity connection?
Could you help check this case? Thanks.
Best Regards,
Cherry
