Hello E2E,
Please help our customer with the problem encountered with the TMS320F28335 GPIO, here is the full query:
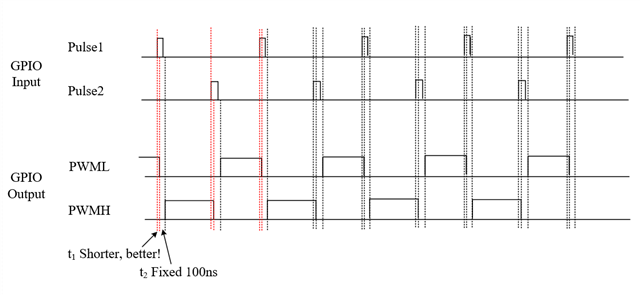
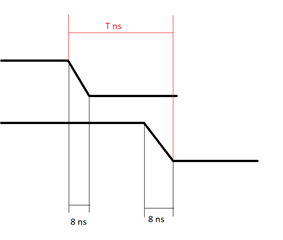
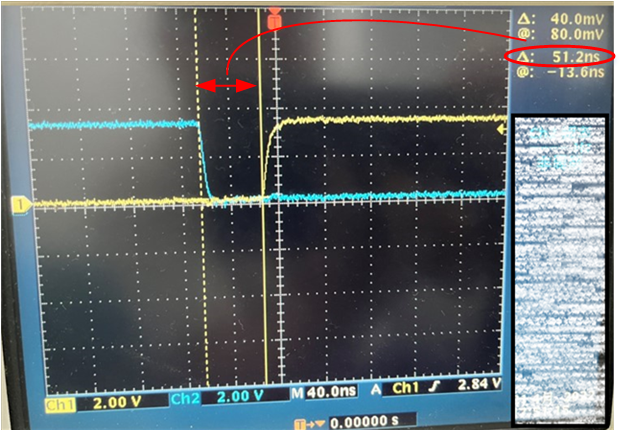
Recently, I find something unexpected about the GPIO delay. For example, when I try to change two GPIO outputs successively shown below, there will be a 50ns delay between two GPIO, which could be observed from the Oscilloscope. (Note: The system clock is 150M, so the system period is about 8.3ns) Why does it take so many system clocks to set or clear GPIO?
GpioDataRegs.GPACLEAR.bit.GPIO4 = 1;
GpioDataRegs.GPASET.bit.GPIO5 = 1;
In addition, when I write code like:
while (!GpioDataRegs.GPADAT.bit.GPIO2);
GpioDataRegs.GPACLEAR.bit.GPIO4 = 1;
There will be a 150ns delay from GPIO2 input to GPIO4 output, which is totally out of my expectation.
Could you help me with these two problems?
Regards,
Carlo