Other Parts Discussed in Thread: C2000WARE, C2000WARE-MOTORCONTROL-SDK
Hi team,
https://e2e.ti.com/support/microcontrollers/c2000-microcontrollers-group/c2000/f/c2000-microcontrollers-forum/1081923/tmdshvmtrinspin-starting-jerk
Above link is my previous thread please check it once.
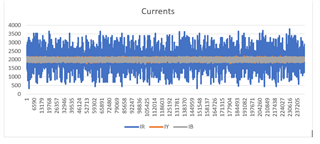
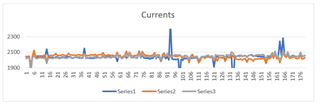
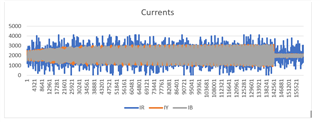
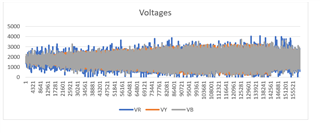
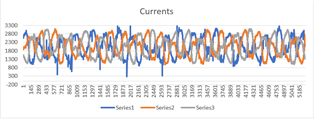
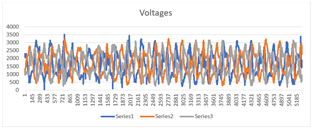
How we can control the starting current of the motor, because of this high starting current our motor windings were burned.
My motor did big noise at the starting.
Can anyone help me to solve this issue?
Below are my motor parameters
#if (USER_MOTOR == Estun_EMJ_04APB22_A)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (20)
#define USER_MOTOR_Rr_Ohm (0.0)
#define USER_MOTOR_Rs_Ohm (2.25093718)
#define USER_MOTOR_Ls_d_H (0.033496008015)
#define USER_MOTOR_Ls_q_H (0.033496008015)
#define USER_MOTOR_RATED_FLUX_VpHz (4.8)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.5)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.5)
#define USER_MOTOR_MAX_CURRENT_A (15.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (2500.0)
#define USER_MOTOR_INERTIA_Kgm2 (3.10002e-02)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (48.0) // Hz 120%of rated //increased to 48 from 30
#define USER_MOTOR_FREQ_LOW_HZ (4.0) // Hz //increased to 4 from 2.5
#define USER_MOTOR_FREQ_HIGH_HZ (40.0) // Hz //increased to 40 ffrom 25
#define USER_MOTOR_VOLT_MIN_V (45.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (300.0) // Volt