Other Parts Discussed in Thread: TIDM-02007, DRV8316, DRV8316REVM, INSTASPIN-BLDC, C2000WARE-MOTORCONTROL-SDK, C2000WARE
Hi Team,
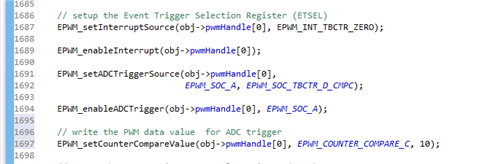
My client is now using the TIDM-02007 based code and switching the driver to a DRV8316. This means that the way current sampling is changed, from in-line current sampling to low-side sampling. In the TIDM-02007 code, we use the SINGLE_SAMPLING mode, which is the PWM triggering the ADC for sampling.
I also checked the reference code "drv8316revm" for DRV8316+280049(3782.drv8316revm.zip), can I know when the ADC is sampling for this code? (PWM rising edge? Or at PWM center? Where is that stated?) If I switch from TIDM-02007 in-line current sampling code to DRV8316's low-side current sampling, does my ADC sampling need to change(Do I need to change current loop)?
Thanks
Jenson