Part Number: TMS320F280049
Other Parts Discussed in Thread: DESIGNDRIVE
Hi Team,
My customer would like to use 280049 in sin/cos sensor part, and I want to know if we have any resource or lib can use in this situation.
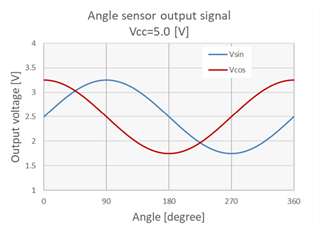
My customer only use the sensor TAS2440, output signal is Sin and Cos. And would like to calculate the angle to do the motor control
Question:
- First question is if we have such reference code to use in this ?
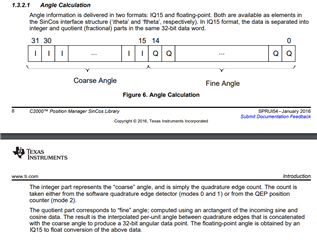
- Second question: if we have no such reference code ,I check the PM_SINCOS_LIB, it use the QEP and sin/cos together. if we can modify the code to use in it? If we can, what we need to modify?
Thanks!
Jenson