Other Parts Discussed in Thread: LAUNCHXL-F280025C, BOOSTXL-DRV8323RS
Hi Yanming:
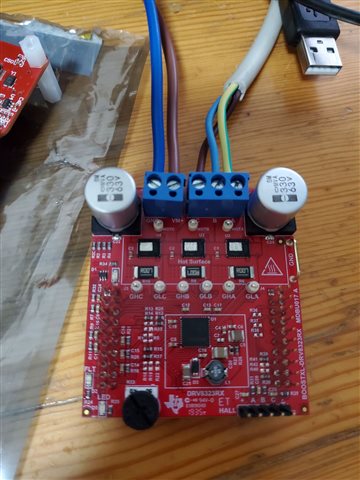
HW: F280025C +8323RS, The motor is in no-load state, and C9 C10 C11 is 47nF.
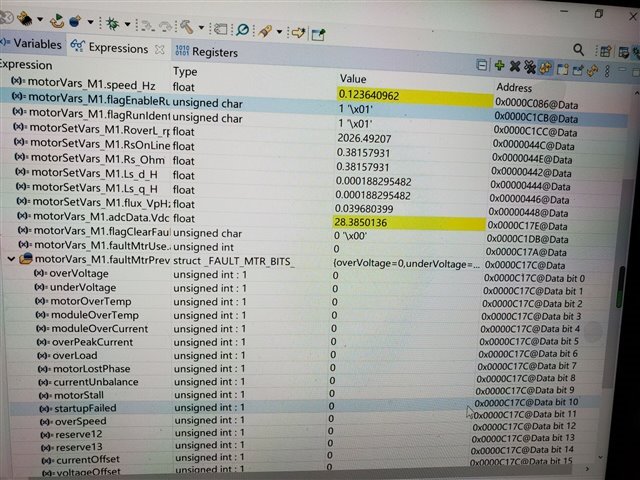
When customers test DMC_LEVEL_4 based on the above hardware, there will be moduleOverCurrent = 1 and flagEnableRunAndIdentify = 0, and moduleOverCurrent = 1 will not appear until the motor is removed. And it can be run with F28027f+8353RS before.

Best regards,
Green