Part Number: TMDSCNCD28388D
Other Parts Discussed in Thread: TMDXIDDK379D, C2000WARE, , SFRA, INA240
Hi,
I am using TI example firmware located in:
\ti\c2000\C2000Ware_MotorControl_SDK_4_00_00_00\solutions\tmdxiddk379d\f2838x\
on TI control card, TMDSCNCD28388D,
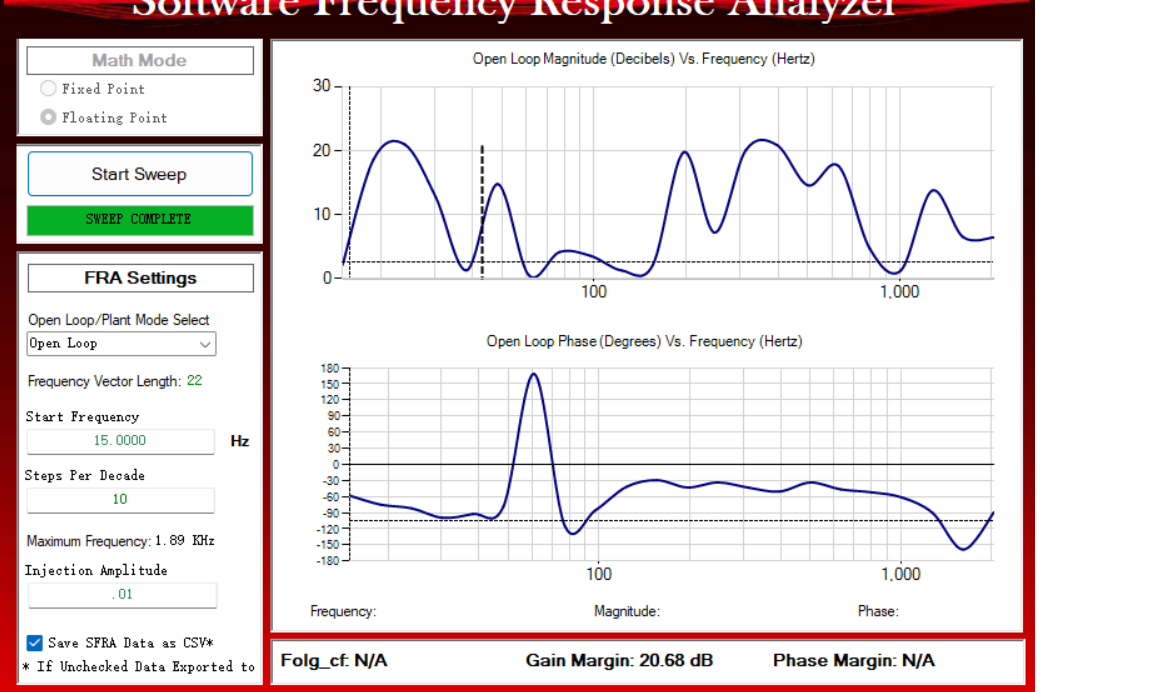
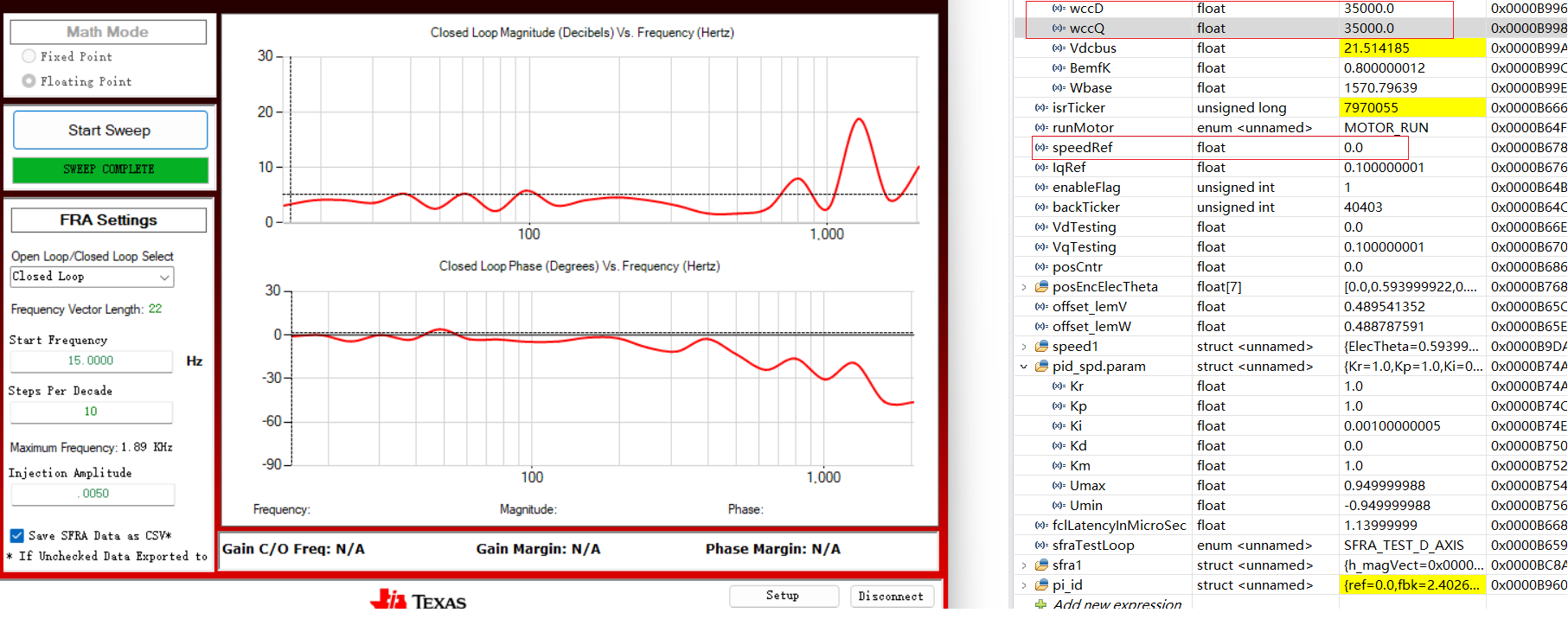
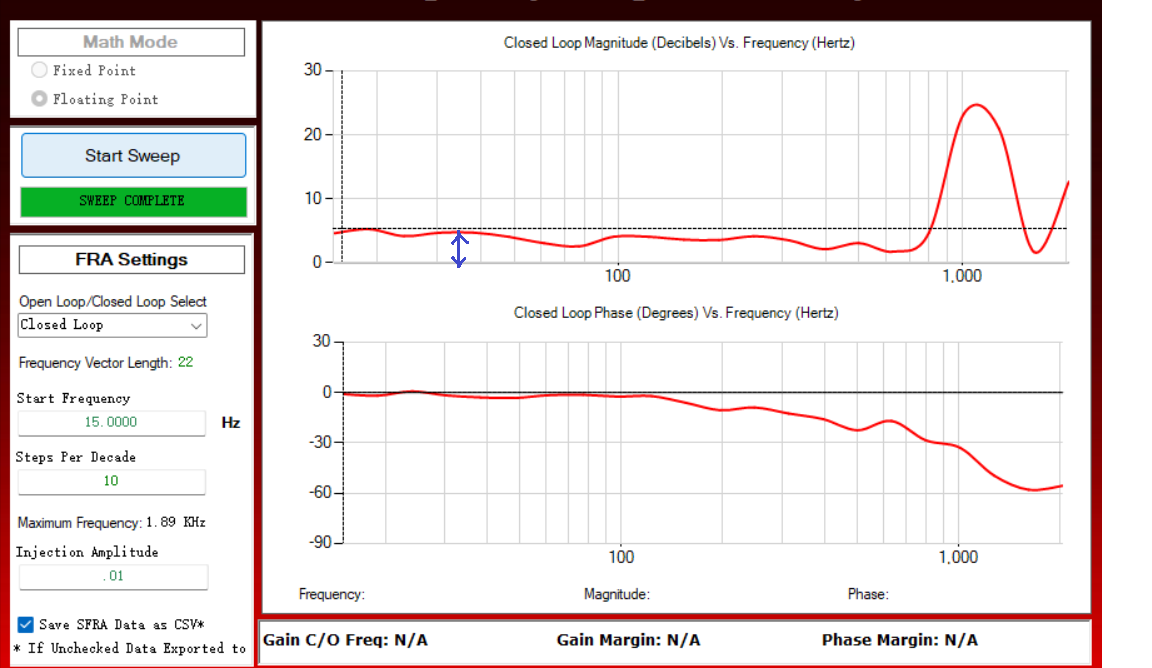
to run SFRA program, which is level 6 setting in the example firwmare.
The motor is running normally, but the SFRA result seems to be not correct. the screen shot is below.
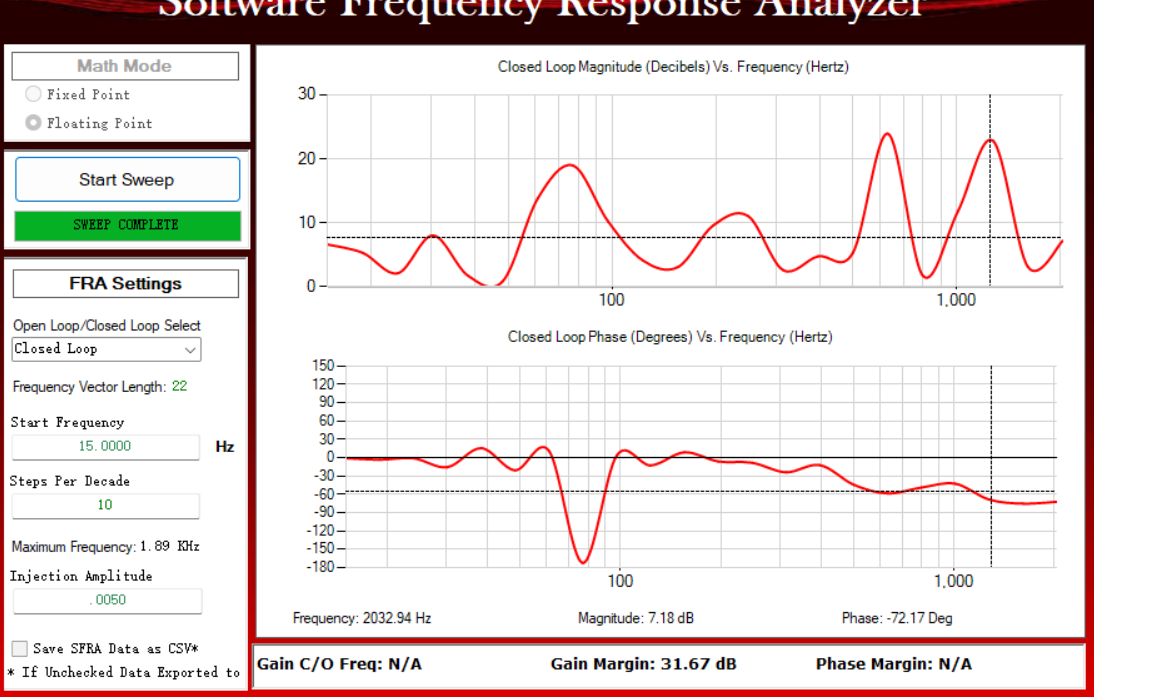
I try to tune the injection amplitude to a higher value, but the result is not improved.
What's wrong with it ? How can I get the correct results ?