Other Parts Discussed in Thread: TMDSCNCD280049C
Dear Sirs
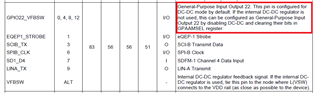
I'm using GPIO22_VFBSW to generate a pulse interrupt on another PCA. Please see schematic below. I used the .syscfg GUI to setup the IO. I'm using a modified blinky example to make the debugging easier. Please see code below. The .syscfg GUI seems to have configured the GPIO22_VFBSW and GPIO28 correctly. However, when I run the program, the GPIO22_VFBSW stays low all the time and the GPIO28 toggles with an amplitude of only 1.75V. When I run this program on the TMDSCNCD280049C control card, it works correctly. Do you have any suggestions?
//#############################################################################
//
// FILE: led_ex1_blinky.c
//
// TITLE: LED Blinky Example
//
//! \addtogroup driver_example_list
//! <h1> LED Blinky Example </h1>
//!
//! This example demonstrates how to blink a LED.
//! If using LaunchPad, select build configuration for LAUNCHXL.
//!
//! \b External \b Connections \n
//! - None.
//!
//! \b Watch \b Variables \n
//! - None.
//!
//
//#############################################################################
//
//
// $Copyright:
// Copyright (C) 2021 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include "board.h"
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Initialize GPIO and configure the GPIO pin as a push-pull output
//
Device_initGPIO();
// GPIO_setPadConfig(DEVICE_GPIO_PIN_LED1, GPIO_PIN_TYPE_STD);
// GPIO_setDirectionMode(DEVICE_GPIO_PIN_LED1, GPIO_DIR_MODE_OUT);
Board_init();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
//
// Loop Forever
//
for(;;)
{
//
// Turn on LED
//
// GPIO_writePin(DEVICE_GPIO_PIN_LED1, 0);
GPIO_writePin(myGPIO1, 0);
GPIO_writePin(myGPIO0, 0);
//
// Delay for a bit.
//
DEVICE_DELAY_US(50000);
//
// Turn off LED
//
// GPIO_writePin(DEVICE_GPIO_PIN_LED1, 1);
GPIO_writePin(myGPIO1, 1);
GPIO_writePin(myGPIO0, 1);
//
// Delay for a bit.
//
DEVICE_DELAY_US(50000);
}
}
//
// End of File
//
//#############################################################################
//
// FILE: device.c
//
// TITLE: Device setup for examples.
//
//#############################################################################
//
//
// $Copyright:
// Copyright (C) 2021 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "device.h"
#include "driverlib.h"
#ifdef __cplusplus
using std::memcpy;
#endif
#define PASS 0
#define FAIL 1
uint32_t Example_PassCount = 0;
uint32_t Example_Fail = 0;
//*****************************************************************************
//
// Function to initialize the device. Primarily initializes system control to a
// known state by disabling the watchdog, setting up the SYSCLKOUT frequency,
// and enabling the clocks to the peripherals.
// The function also configures the GPIO pins 22 and 23 in digital mode.
// To configure these pins as analog pins, use the function GPIO_setAnalogMode
//
//*****************************************************************************
void Device_init(void)
{
//
// Disable the watchdog
//
SysCtl_disableWatchdog();
#ifdef _FLASH
//
// Copy time critical code and flash setup code to RAM. This includes the
// following functions: InitFlash();
//
// The RamfuncsLoadStart, RamfuncsLoadSize, and RamfuncsRunStart symbols
// are created by the linker. Refer to the device .cmd file.
//
memcpy(&RamfuncsRunStart, &RamfuncsLoadStart, (size_t)&RamfuncsLoadSize);
//
// Call Flash Initialization to setup flash waitstates. This function must
// reside in RAM.
//
Flash_initModule(FLASH0CTRL_BASE, FLASH0ECC_BASE, DEVICE_FLASH_WAITSTATES);
#endif
//
// Set up PLL control and clock dividers
//
// SysCtl_setClock(DEVICE_SETCLOCK_CFG);
SysCtl_setClock(DEVISE_SETCLOCK_OSC2);
//
// Make sure the LSPCLK divider is set to the default (divide by 4)
//
SysCtl_setLowSpeedClock(SYSCTL_LSPCLK_PRESCALE_4);
//
// These asserts will check that the #defines for the clock rates in
// device.h match the actual rates that have been configured. If they do
// not match, check that the calculations of DEVICE_SYSCLK_FREQ and
// DEVICE_LSPCLK_FREQ are accurate. Some examples will not perform as
// expected if these are not correct.
//
ASSERT(SysCtl_getClock(DEVICE_OSCSRC_FREQ) == DEVICE_SYSCLK_FREQ);
ASSERT(SysCtl_getLowSpeedClock(DEVICE_OSCSRC_FREQ) == DEVICE_LSPCLK_FREQ);
#ifndef _FLASH
//
// Call Device_cal function when run using debugger
// This function is called as part of the Boot code. The function is called
// in the Device_init function since during debug time resets, the boot code
// will not be executed and the gel script will reinitialize all the
// registers and the calibrated values will be lost.
// Sysctl_deviceCal is a wrapper function for Device_Cal
//
SysCtl_deviceCal();
#endif
//
// Turn on all peripherals
//
Device_enableAllPeripherals();
//
//Disable DC DC in Analog block
//
ASysCtl_disableDCDC();
//
//Configure GPIO in Push Pull,Output Mode
//
GPIO_setPadConfig(22U, GPIO_PIN_TYPE_STD);
GPIO_setPadConfig(23U, GPIO_PIN_TYPE_STD);
GPIO_setDirectionMode(22U, GPIO_DIR_MODE_OUT);
GPIO_setDirectionMode(23U, GPIO_DIR_MODE_OUT);
//
// Configure GPIO22 and GPIO23 as digital pins
//
GPIO_setAnalogMode(22U, GPIO_ANALOG_DISABLED);
GPIO_setAnalogMode(23U, GPIO_ANALOG_DISABLED);
}
//*****************************************************************************
//
// Function to turn on all peripherals, enabling reads and writes to the
// peripherals' registers.
//
// Note that to reduce power, unused peripherals should be disabled.
//
//*****************************************************************************
void Device_enableAllPeripherals(void)
{
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CLA1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_DMA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TIMER0);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TIMER1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TIMER2);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_HRPWM);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM2);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM3);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM4);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM5);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM6);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM7);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EPWM8);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ECAP1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ECAP2);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ECAP3);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ECAP4);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ECAP5);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ECAP6);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ECAP7);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EQEP1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_EQEP2);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_SD1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_SCIA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_SCIB);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_SPIA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_SPIB);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_I2CA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CANA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CANB);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ADCA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ADCB);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_ADCC);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CMPSS1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CMPSS2);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CMPSS3);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CMPSS4);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CMPSS5);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CMPSS6);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CMPSS7);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PGA1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PGA2);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PGA3);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PGA4);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PGA5);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PGA6);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PGA7);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_DACA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_DACB);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_LINA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_PMBUSA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_FSITXA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_FSIRXA);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CLB1);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CLB2);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CLB3);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_CLB4);
SysCtl_enablePeripheral(SYSCTL_PERIPH_CLK_DCC0);
}
//*****************************************************************************
//
// Function to disable pin locks and enable pullups on GPIOs.
//
//*****************************************************************************
void Device_initGPIO(void)
{
//
// Disable pin locks.
//
GPIO_unlockPortConfig(GPIO_PORT_A, 0xFFFFFFFF);
GPIO_unlockPortConfig(GPIO_PORT_B, 0xFFFFFFFF);
GPIO_unlockPortConfig(GPIO_PORT_H, 0xFFFFFFFF);
}
//*****************************************************************************
//
// Error handling function to be called when an ASSERT is violated
//
//*****************************************************************************
void __error__(char *filename, uint32_t line)
{
//
// An ASSERT condition was evaluated as false. You can use the filename and
// line parameters to determine what went wrong.
//
ESTOP0;
}
//#############################################################################
//
// FILE: device.h
//
// TITLE: Device setup for examples.
//
//#############################################################################
//
//
// $Copyright:
// Copyright (C) 2021 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
#ifndef __DEVICE_H__
#define __DEVICE_H__
//
// Included Files
//
#include "driverlib.h"
//*****************************************************************************
//
// Defines for pin numbers and other GPIO configuration
//
//*****************************************************************************
#ifdef _LAUNCHXL_F280049C
//
// LaunchPad
//
//
// LEDs
//
#define DEVICE_GPIO_PIN_LED1 23U // GPIO number for LD4
#define DEVICE_GPIO_PIN_LED2 34U // GPIO number for LD5
#define DEVICE_GPIO_CFG_LED1 GPIO_23_GPIO23 // "pinConfig" for LD4
#define DEVICE_GPIO_CFG_LED2 GPIO_34_GPIO34 // "pinConfig" for LD5
//
// CANA
//
#define DEVICE_GPIO_PIN_CANTXA 32U // GPIO number for CANTXA
#define DEVICE_GPIO_PIN_CANRXA 33U // GPIO number for CANRXA
#define DEVICE_GPIO_CFG_CANRXA GPIO_33_CANA_RX // "pinConfig" for CANA RX
#define DEVICE_GPIO_CFG_CANTXA GPIO_32_CANA_TX // "pinConfig" for CANA TX
//
// CAN External Loopback
//
#define DEVICE_GPIO_CFG_CANRXB GPIO_10_CANB_RX // "pinConfig" for CANB RX
#define DEVICE_GPIO_CFG_CANTXB GPIO_8_CANB_TX // "pinConfig" for CANB TX
//
// LINA
//
#define DEVICE_GPIO_CFG_LINTXA GPIO_37_LINA_TX // "pinConfig" for LINA TX
#define DEVICE_GPIO_CFG_LINRXA GPIO_35_LINA_RX // "pinConfig" for LINA RX
//
// FSI
//
#define DEVICE_GPIO_PIN_FSI_RXCLK 33U // GPIO number for FSI RXCLK
#define DEVICE_GPIO_PIN_FSI_RX0 12U // GPIO number for FSI RX0
#define DEVICE_GPIO_PIN_FSI_RX1 2U // GPIO number for FSI RX1
#define DEVICE_GPIO_CFG_FSI_TXCLK GPIO_7_FSITXA_CLK // "pinConfig" for FSI TXCLK
#define DEVICE_GPIO_CFG_FSI_TX0 GPIO_6_FSITXA_D0 // "pinConfig" for FSI TX0
#define DEVICE_GPIO_CFG_FSI_TX1 GPIO_25_FSITXA_D1 // "pinConfig" for FSI TX1
#define DEVICE_GPIO_CFG_FSI_RXCLK GPIO_33_FSIRXA_CLK // "pinConfig" for FSI RXCLK
#define DEVICE_GPIO_CFG_FSI_RX0 GPIO_12_FSIRXA_D0 // "pinConfig" for FSI RX0
#define DEVICE_GPIO_CFG_FSI_RX1 GPIO_2_FSIRXA_D1 // "pinConfig" for FSI RX1
//
// SPI
//
#define DEVICE_GPIO_PIN_SPICLKA 56U // GPIO number for SPI CLKA
#define DEVICE_GPIO_PIN_SPISIMOA 16U // GPIO number for SPI SIMOA
#define DEVICE_GPIO_PIN_SPISOMIA 17U // GPIO number for SPI SOMIA
#define DEVICE_GPIO_PIN_SPISTEA 57U // GPIO number for SPI STEA
#define DEVICE_GPIO_CFG_SPICLKA GPIO_56_SPIA_CLK // "pinConfig" for SPI CLKA
#define DEVICE_GPIO_CFG_SPISIMOA GPIO_16_SPIA_SIMO // "pinConfig" for SPI SIMOA
#define DEVICE_GPIO_CFG_SPISOMIA GPIO_17_SPIA_SOMI // "pinConfig" for SPI SOMIA
#define DEVICE_GPIO_CFG_SPISTEA GPIO_57_SPIA_STE // "pinConfig" for SPI STEA
#define DEVICE_GPIO_PIN_SPICLKB 22U // GPIO number for SPI CLKB
#define DEVICE_GPIO_PIN_SPISIMOB 24U // GPIO number for SPI SIMOB
#define DEVICE_GPIO_PIN_SPISOMIB 31U // GPIO number for SPI SOMIB
#define DEVICE_GPIO_PIN_SPISTEB 27U // GPIO number for SPI STEB
#define DEVICE_GPIO_CFG_SPICLKB GPIO_22_SPIB_CLK // "pinConfig" for SPI CLKB
#define DEVICE_GPIO_CFG_SPISIMOB GPIO_24_SPIB_SIMO // "pinConfig" for SPI SIMOB
#define DEVICE_GPIO_CFG_SPISOMIB GPIO_31_SPIB_SOMI // "pinConfig" for SPI SOMIB
#define DEVICE_GPIO_CFG_SPISTEB GPIO_27_SPIB_STE // "pinConfig" for SPI STEB
//
// I2C
//
#define DEVICE_GPIO_PIN_SDAA 35U // GPIO number for I2C SDAA
#define DEVICE_GPIO_PIN_SCLA 37U // GPIO number for I2C SCLA
#define DEVICE_GPIO_CFG_SDAA GPIO_35_I2CA_SDA // "pinConfig" for I2C SDAA
#define DEVICE_GPIO_CFG_SCLA GPIO_37_I2CA_SCL // "pinConfig" for I2C SCLA
//
// eQEP
//
#define DEVICE_GPIO_PIN_EQEP1A 35U // GPIO number for EQEP 1A
#define DEVICE_GPIO_PIN_EQEP1B 37U // GPIO number for EQEP 1B
#define DEVICE_GPIO_PIN_EQEP1I 59U // GPIO number for EQEP 1I
#define DEVICE_GPIO_CFG_EQEP1A GPIO_35_EQEP1_A // "pinConfig" for EQEP 1A
#define DEVICE_GPIO_CFG_EQEP1B GPIO_37_EQEP1_B // "pinConfig" for EQEP 1B
#define DEVICE_GPIO_CFG_EQEP1I GPIO_59_EQEP1_INDEX // "pinConfig" for EQEP 1I
//
// EPWM
//
#define DEVICE_PERIPHERAL_BASE_EPWM EPWM6_BASE // Base peripheral EPWM 6
#define DEVICE_PERIPHERAL_INT_EPWM INT_EPWM6 // Base peripheral EPWM 6 interrupt
#define DEVICE_GPIO_PIN_EPWMxA 10U // GPIO number for EPWM6A
#define DEVICE_GPIO_PIN_EPWMxB 11U // GPIO number for EPWM6B
#define DEVICE_GPIO_PIN_IOINDEX 8U // GPIO number for IO Index
#define DEVICE_GPIO_CFG_EPWMxA GPIO_10_EPWM6_A // "pinConfig" for EPWM6A
#define DEVICE_GPIO_CFG_EPWMxB GPIO_11_EPWM6_B // "pinConfig" for EPWM6B
#define DEVICE_GPIO_CFG_IOINDEX GPIO_8_GPIO8 // "pinConfig" for IO Index
#else
//
// ControlCARD
//
//
// LEDs
//
#define DEVICE_GPIO_PIN_LED1 31U // GPIO number for LD2
#define DEVICE_GPIO_PIN_LED2 34U // GPIO number for LD3
#define DEVICE_GPIO_CFG_LED1 GPIO_31_GPIO31 // "pinConfig" for LD2
#define DEVICE_GPIO_CFG_LED2 GPIO_34_GPIO34 // "pinConfig" for LD3
//
// CANA
//
#define DEVICE_GPIO_PIN_CANTXA 31U // GPIO number for CANTXA
#define DEVICE_GPIO_PIN_CANRXA 30U // GPIO number for CANRXA
//
// CAN External Loopback
//
#define DEVICE_GPIO_CFG_CANRXA GPIO_30_CANA_RX // "pinConfig" for CANA RX
#define DEVICE_GPIO_CFG_CANTXA GPIO_31_CANA_TX // "pinConfig" for CANA TX
#define DEVICE_GPIO_CFG_CANRXB GPIO_10_CANB_RX // "pinConfig" for CANB RX
#define DEVICE_GPIO_CFG_CANTXB GPIO_8_CANB_TX // "pinConfig" for CANB TX
//
// LINA
//
#define DEVICE_GPIO_CFG_LINTXA GPIO_58_LINA_TX // "pinConfig" for LINA TX
#define DEVICE_GPIO_CFG_LINRXA GPIO_59_LINA_RX // "pinConfig" for LINA RX
//
// FSI
//
#define DEVICE_GPIO_PIN_FSI_RXCLK 13U // GPIO number for FSI RXCLK
#define DEVICE_GPIO_PIN_FSI_RX0 12U // GPIO number for FSI RX0
#define DEVICE_GPIO_PIN_FSI_RX1 11U // GPIO number for FSI RX1
#define DEVICE_GPIO_CFG_FSI_TXCLK GPIO_27_FSITXA_CLK // "pinConfig" for FSI TXCLK
#define DEVICE_GPIO_CFG_FSI_TX0 GPIO_26_FSITXA_D0 // "pinConfig" for FSI TX0
#define DEVICE_GPIO_CFG_FSI_TX1 GPIO_25_FSITXA_D1 // "pinConfig" for FSI TX1
#define DEVICE_GPIO_CFG_FSI_RXCLK GPIO_13_FSIRXA_CLK // "pinConfig" for FSI RXCLK
#define DEVICE_GPIO_CFG_FSI_RX0 GPIO_12_FSIRXA_D0 // "pinConfig" for FSI RX0
#define DEVICE_GPIO_CFG_FSI_RX1 GPIO_11_FSIRXA_D1 // "pinConfig" for FSI RX1
//
// SPI
//
#define DEVICE_GPIO_PIN_SPICLKA 9U // GPIO number for SPI CLKA
#define DEVICE_GPIO_PIN_SPISIMOA 8U // GPIO number for SPI SIMOA
#define DEVICE_GPIO_PIN_SPISOMIA 10U // GPIO number for SPI SOMIA
#define DEVICE_GPIO_PIN_SPISTEA 11U // GPIO number for SPI STEA
#define DEVICE_GPIO_CFG_SPICLKA GPIO_9_SPIA_CLK // "pinConfig" for SPI CLKA
#define DEVICE_GPIO_CFG_SPISIMOA GPIO_8_SPIA_SIMO // "pinConfig" for SPI SIMOA
#define DEVICE_GPIO_CFG_SPISOMIA GPIO_10_SPIA_SOMI // "pinConfig" for SPI SOMIA
#define DEVICE_GPIO_CFG_SPISTEA GPIO_11_SPIA_STE // "pinConfig" for SPI STEA
#define DEVICE_GPIO_PIN_SPICLKB 26U // GPIO number for SPI CLKB
#define DEVICE_GPIO_PIN_SPISIMOB 24U // GPIO number for SPI SIMOB
#define DEVICE_GPIO_PIN_SPISOMIB 25U // GPIO number for SPI SOMIB
#define DEVICE_GPIO_PIN_SPISTEB 27U // GPIO number for SPI STEB
#define DEVICE_GPIO_CFG_SPICLKB GPIO_26_SPIB_CLK // "pinConfig" for SPI CLKB
#define DEVICE_GPIO_CFG_SPISIMOB GPIO_24_SPIB_SIMO // "pinConfig" for SPI SIMOB
#define DEVICE_GPIO_CFG_SPISOMIB GPIO_25_SPIB_SOMI // "pinConfig" for SPI SOMIB
#define DEVICE_GPIO_CFG_SPISTEB GPIO_27_SPIB_STE // "pinConfig" for SPI STEB
//
// I2C
//
#define DEVICE_GPIO_PIN_SDAA 32U // GPIO number for I2C SDAA
#define DEVICE_GPIO_PIN_SCLA 33U // GPIO number for I2C SCLA
#define DEVICE_GPIO_CFG_SDAA GPIO_32_I2CA_SDA // "pinConfig" for I2C SDAA
#define DEVICE_GPIO_CFG_SCLA GPIO_33_I2CA_SCL // "pinConfig" for I2C SCLA
//
// eQEP
//
#define DEVICE_GPIO_PIN_EQEP1A 6U // GPIO number for EQEP 1A
#define DEVICE_GPIO_PIN_EQEP1B 7U // GPIO number for EQEP 1B
#define DEVICE_GPIO_PIN_EQEP1I 9U // GPIO number for EQEP 1I
#define DEVICE_GPIO_CFG_EQEP1A GPIO_6_EQEP1_A // "pinConfig" for EQEP 1A
#define DEVICE_GPIO_CFG_EQEP1B GPIO_7_EQEP1_B // "pinConfig" for EQEP 1B
#define DEVICE_GPIO_CFG_EQEP1I GPIO_9_EQEP1_INDEX // "pinConfig" for EQEP 1I
//
// EPWM
//
#define DEVICE_PERIPHERAL_BASE_EPWM EPWM1_BASE // Base peripheral EPWM 1
#define DEVICE_PERIPHERAL_INT_EPWM INT_EPWM1 // Base peripheral EPWM 1 interrupt
#define DEVICE_GPIO_PIN_EPWMxA 0U // GPIO number for EPWM1A
#define DEVICE_GPIO_PIN_EPWMxB 1U // GPIO number for EPWM1B
#define DEVICE_GPIO_PIN_IOINDEX 2U // GPIO number for IO Index
#define DEVICE_GPIO_CFG_EPWMxA GPIO_0_EPWM1_A // "pinConfig" for EPWM1A
#define DEVICE_GPIO_CFG_EPWMxB GPIO_1_EPWM1_B // "pinConfig" for EPWM1B
#define DEVICE_GPIO_CFG_IOINDEX GPIO_2_GPIO2 // "pinConfig" for IO Index
#endif
#define DEVICE_GPIO_CFG_EPWM1A GPIO_0_EPWM1_A // "pinConfig" for EPWM1A
#define DEVICE_GPIO_PIN_EPWM1A 0U // GPIO number for EPWM1A
//
// SCI for USB-to-UART adapter on FTDI chip
//
#define DEVICE_GPIO_PIN_SCIRXDA 28U // GPIO number for SCI RX
#define DEVICE_GPIO_PIN_SCITXDA 29U // GPIO number for SCI TX
#define DEVICE_GPIO_CFG_SCIRXDA GPIO_28_SCIA_RX // "pinConfig" for SCI RX
#define DEVICE_GPIO_CFG_SCITXDA GPIO_29_SCIA_TX // "pinConfig" for SCI TX
//*****************************************************************************
//
// Defines related to clock configuration
//
//*****************************************************************************
//
// 20MHz XTAL on controlCARD and Launchpad. For use with SysCtl_getClock().
//
#define DEVICE_OSCSRC_FREQ 20000000U
//
// Define to pass to SysCtl_setClock(). Will configure the clock as follows:
// PLLSYSCLK = 20MHz (XTAL_OSC) * 10 (IMULT) * 1 (FMULT) / 2 (PLLCLK_BY_2)
//
#define DEVICE_SETCLOCK_CFG (SYSCTL_OSCSRC_XTAL | SYSCTL_IMULT(10) | \
SYSCTL_FMULT_NONE | SYSCTL_SYSDIV(2) | \
SYSCTL_PLL_ENABLE)
//
// 100MHz SYSCLK frequency based on the above DEVICE_SETCLOCK_CFG. Update the
// code below if a different clock configuration is used!
//
#define DEVICE_SYSCLK_FREQ ((DEVICE_OSCSRC_FREQ * 10 * 1) / 2)
//
// 25MHz LSPCLK frequency based on the above DEVICE_SYSCLK_FREQ and a default
// low speed peripheral clock divider of 4. Update the code below if a
// different LSPCLK divider is used!
//
#define DEVICE_LSPCLK_FREQ (DEVICE_SYSCLK_FREQ / 4)
//
// Configures the SYSCLK to 100MHz.
// Uses internal OSC2.
//
#define DEVISE_SETCLOCK_OSC2 (SYSCTL_OSCSRC_OSC2 | SYSCTL_IMULT(10) | \
SYSCTL_FMULT_NONE | SYSCTL_SYSDIV(1) | \
SYSCTL_PLL_ENABLE)
//*****************************************************************************
//
// Macro to call SysCtl_delay() to achieve a delay in microseconds. The macro
// will convert the desired delay in microseconds to the count value expected
// by the function. \b x is the number of microseconds to delay.
//
//*****************************************************************************
#define DEVICE_DELAY_US(x) SysCtl_delay(((((long double)(x)) / (1000000.0L / \
(long double)DEVICE_SYSCLK_FREQ)) - 9.0L) / 5.0L)
//*****************************************************************************
// Defines for setting FSI clock speeds in normal FSI mode (SPI_MODE == 0)
//*****************************************************************************
//
// TXCLKIN = INPUT_CLOCK / PRESCALE_VAL
// TXCLK (in FSI mode) = TXCLKIN / 2
// TXCLK (in SPI mode) = TXCLKIN
//
// Below assumes INPUT_CLOCK == 200 MHz (PLLRAWCLK, SEL_PLLCLK == 1)
//
#define FSI_PRESCALE_50MHZ 2U
#define FSI_PRESCALE_25MHZ 4U
#define FSI_PRESCALE_10MHZ 10U
#define FSI_PRESCALE_5MHZ 20U
//*****************************************************************************
//
// Defines, Globals, and Header Includes related to Flash Support
//
//*****************************************************************************
#ifdef _FLASH
#include <stddef.h>
extern uint16_t RamfuncsLoadStart;
extern uint16_t RamfuncsLoadEnd;
extern uint16_t RamfuncsLoadSize;
extern uint16_t RamfuncsRunStart;
extern uint16_t RamfuncsRunEnd;
extern uint16_t RamfuncsRunSize;
#endif
#define DEVICE_FLASH_WAITSTATES 4
extern uint32_t Example_PassCount;
extern uint32_t Example_Fail;
//*****************************************************************************
//
// Function Prototypes
//
//*****************************************************************************
//*****************************************************************************
//*****************************************************************************
//
//! \addtogroup device_api
//! @{
//
//***
//*****************************************************************************
//
//! @brief Function to initialize the device. Primarily initializes system control to a
//! known state by disabling the watchdog, setting up the SYSCLKOUT frequency,
//! and enabling the clocks to the peripherals.
//! The function also configures the GPIO pins 22 and 23 in digital mode.
//! To configure these pins as analog pins, use the function GPIO_setAnalogMode
//!
//! \return None
//
//*****************************************************************************
extern void Device_init(void);
//*****************************************************************************
//!
//!
//! @brief Function to turn on all peripherals, enabling reads and writes to the
//! peripherals' registers.
//!
//! Note that to reduce power, unused peripherals should be disabled.
//!
//! \return None
//
//*****************************************************************************
extern void Device_enableAllPeripherals(void);
//*****************************************************************************
//!
//!
//! @brief Function to disable pin locks and enable pullups on GPIOs.
//!
//! \return None
//
//*****************************************************************************
extern void Device_initGPIO(void);
//*****************************************************************************
//!
//! @brief Error handling function to be called when an ASSERT is violated
//!
//! \param *filename File name in which the error has occurred
//! \param line Line number within the file
//! \return None
//
//*****************************************************************************
extern void __error__(char *filename, uint32_t line);
//*****************************************************************************
//
// Close the Doxygen group.
//! @}
//
//*****************************************************************************
#endif // __DEVICE_H__
/*
* Copyright (c) 2020 Texas Instruments Incorporated - http://www.ti.com
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "board.h"
void Board_init()
{
EALLOW;
PinMux_init();
GPIO_init();
EDIS;
}
void PinMux_init()
{
// GPIO22_VFBSW -> myGPIO1 Pinmux
GPIO_setPinConfig(GPIO_22_GPIO22);
// GPIO28 -> myGPIO0 Pinmux
GPIO_setPinConfig(GPIO_28_GPIO28);
}
void GPIO_init(){
//myGPIO1 initialization
GPIO_setDirectionMode(myGPIO1, GPIO_DIR_MODE_OUT);
GPIO_setPadConfig(myGPIO1, GPIO_PIN_TYPE_STD);
GPIO_setMasterCore(myGPIO1, GPIO_CORE_CPU1);
GPIO_setQualificationMode(myGPIO1, GPIO_QUAL_ASYNC);
GPIO_writePin(myGPIO1, 1);
//myGPIO0 initialization
GPIO_setDirectionMode(myGPIO0, GPIO_DIR_MODE_OUT);
GPIO_setPadConfig(myGPIO0, GPIO_PIN_TYPE_STD);
GPIO_setMasterCore(myGPIO0, GPIO_CORE_CPU1);
GPIO_setQualificationMode(myGPIO0, GPIO_QUAL_ASYNC);
GPIO_writePin(myGPIO0, 1);
}
/* * Copyright (c) 2020 Texas Instruments Incorporated - http://www.ti.com * All rights reserved. * * Redistribution and use in source and binary forms, with or without * modification, are permitted provided that the following conditions * are met: * * * Redistributions of source code must retain the above copyright * notice, this list of conditions and the following disclaimer. * * * Redistributions in binary form must reproduce the above copyright * notice, this list of conditions and the following disclaimer in the * documentation and/or other materials provided with the distribution. * * * Neither the name of Texas Instruments Incorporated nor the names of * its contributors may be used to endorse or promote products derived * from this software without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, * THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR * PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR * CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, * EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, * PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; * OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, * WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR * OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, * EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * */ #ifndef BOARD_H #define BOARD_H // // Included Files // #include "driverlib.h" #include "device.h" #define myGPIO1 22 #define myGPIO0 28 void Board_init(); void GPIO_init(); void PinMux_init(); #endif // end of BOARD_H definition