



Other Parts Discussed in Thread: C2000WARE, BOOSTXL-DRV8320RS, BOOSTXL-3PHGANINV, LAUNCHXL-F280049C, C2000WARE-MOTORCONTROL-SDK
Hi,
Background and Hardware:
- I'm working though Lab 5 of the Motor Parameters Identification of the Motor Control SDK ("InstapSPIN Projects and Labs User's Guide")
- I'm using C2000Ware_MotorControl_SDK_4_01_00_00
- F280049C-LaunchPad coupled with BoostXL-DRV8320RS
- BLDC motor with 26 pole pairs
- BLDC motor with 28VDC nominal voltage
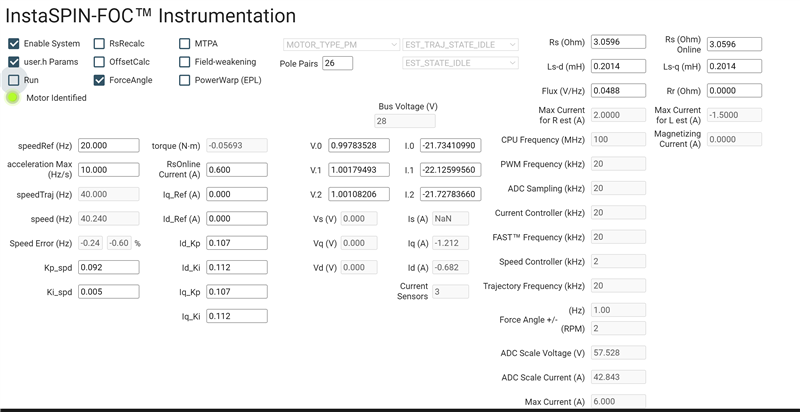
When using InstaSpin GUI online for the setup, I get the values below, which are all believably, except the Rs. Using a multi-meter I measure close to 5.9 ohm across the motor phases, as compared to the reported 3.06 ohm.
Then, when I run the modified Lab 05 code, I have the following results:
- Rs calculated is close InstaSpin GUI calculation, but still half of the what I measure across the motor phases with a multi-meter.
- Ls-d, Ls-q, and Flux (V/Hz) routines do not seem to function properly. After ramping up the motor to the targeted speed, the motor stalls.
- Below are my current motor parameters:
#elif (USER_MOTOR == my_motor_1) // #define USER_MOTOR_TYPE MOTOR_TYPE_PM #define USER_MOTOR_NUM_POLE_PAIRS (26) #define USER_MOTOR_Rr_Ohm (NULL) #define USER_MOTOR_Rs_Ohm (NULL) #define USER_MOTOR_Ls_d_H (NULL) #define USER_MOTOR_Ls_q_H (NULL) #define USER_MOTOR_RATED_FLUX_VpHz (NULL) #define USER_MOTOR_MAGNETIZING_CURRENT_A (0.0) #define USER_MOTOR_RES_EST_CURRENT_A (4) //guess//10-30% of max current #define USER_MOTOR_IND_EST_CURRENT_A (-4)//guess 10-30% of max current #define USER_MOTOR_MAX_CURRENT_A (5.5)//Max continuous current RMS #define USER_MOTOR_FLUX_EXC_FREQ_Hz (60) //10-30% of rate frequency of motor #define USER_MOTOR_NUM_ENC_SLOTS (NULL) #define USER_MOTOR_FREQ_MIN_HZ (13.3) // Hz #define USER_MOTOR_FREQ_MAX_HZ (23.3) // Hz
My questions:
- Why is the calculated Rs about half of what I measure with a multi-meter?
- Why is the motor stopping after ramp-up when trying to estimate Flux (V/Hz)? I've experimented with USER_MOTOR_RES_EST_CURRENT_A and USER_MOTOR_IND_EST_CURRENT_A, setting as high as +/- 5A. However, as soon as the targeted speed is hit, the motor stops spinning. With InstaSpin GUI online, a current of about 0.7A is held constant throughout the motor parameter identification process. When using the modified Lab 05 code, current is held high for the initial Rs calculation, then current drops, motor ramps up in speed and current, then finally motor hits targeted speed and stops spinning before finishing the Ls-d, Ls-q, and Flux (V/Hz) estimations.
- What version of the MotorControl SDK is the online InstaSpin GUI using?
Thanks,
Nicholas
