


Other Parts Discussed in Thread: MOTORWARE
Hi Team,
I am using CCS12.2 with motorware SDK v4.01.00.00. I was able to run FOC sensorless (DMC_level_4) using Teknik 2310LP-LN-04K motor on F280039C Launchpad and 3 phase GaN INV by following the steps given in the lab guide.
However I am not able to run sensored FOC for the same setup with the encoder settings defined by default for Teknik motor. I have enabled the corresponding predefined symbols as defined in the guide.
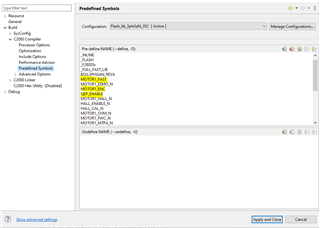
In FAST estimator mode my speed feedback matches my reference speed in DMC LEVEL 4 and the angle_FOC_rad keeps changing (angle ENC rad = 0).
However in ENC estimator mode, my speed feedback and angle_ENC_rad parameters are always 0 and the DC power supply consumes way higher current than sensorless FOC. Any help in figuring out what the issue could be? Also with the new structure of UMCL can you point out the code location where QEP GPIOs are set, QEP CLK enabled and QEP Angle is provided to FOC handle?
Thanks,

