Part Number: TMS320F28377S
Dear Sir
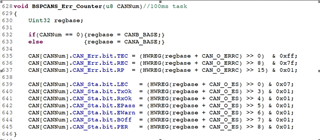
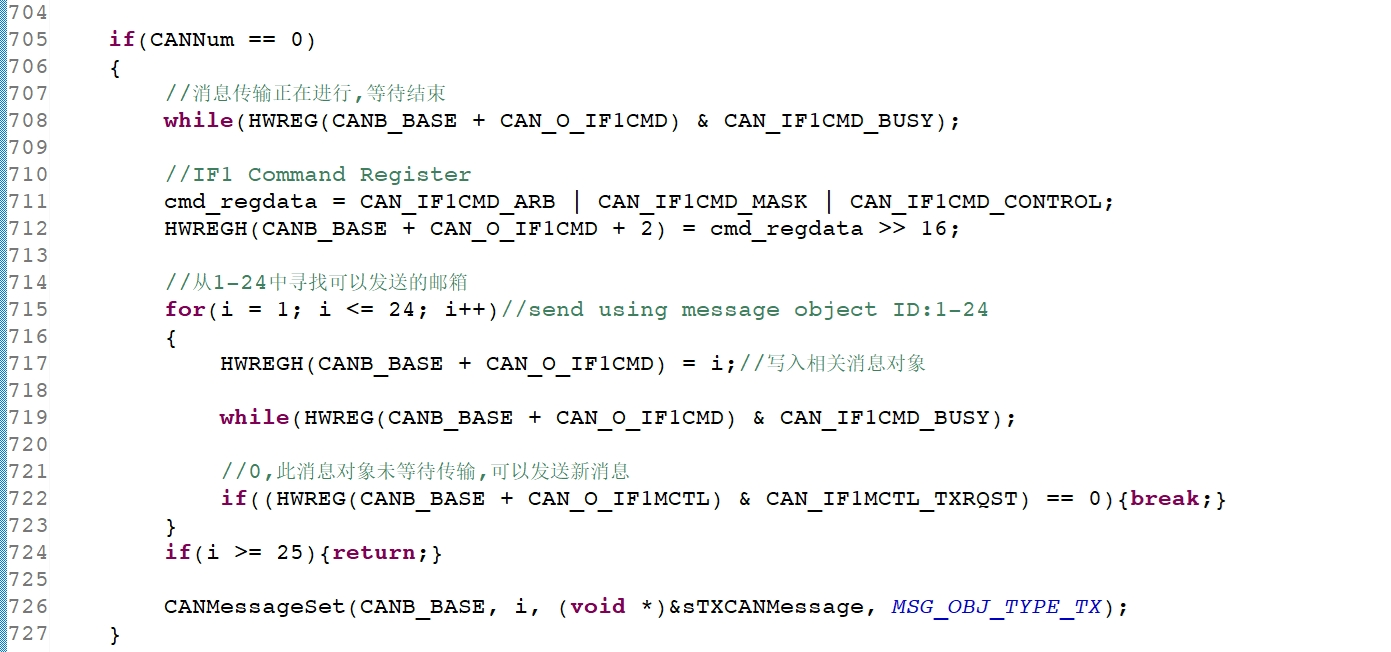
When the CAN port is used to send and receive data, there is a rare probability that the CAN receiving data of DSP itself is abnormal. At this time, the CAN sending data of DSP itself is normal. When the software is checked in detail, it is found that the software cannot enter the CAN receiving interrupt.
What are the possible causes of this situation and what are the solutions you can try?