


Other Parts Discussed in Thread: C2000WARE
Hi,
I'm using lab is13.
questions:
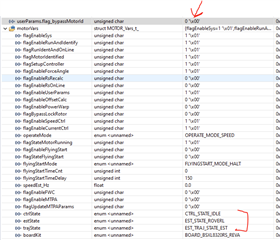
1. What is the correct way to enable motor ID, if I already set "flagEnableSys" and run the motor once? I tried setting userParams.flag_bypassMotorId = 0 and calling EST_setParams(estHandle, &userParams); again in the while loop, but the estimator gets stuck at ROVERL. Strangely, the "flagMotorIdentified" is 1.
2. What is the correct way of enabling RsRecalc, after enabling "flagEnableSys", so next time the motor runs it will start with RsRecalc? I get the same behavior as with the motor ID above - the Estimator is stuck at the RS state:

3. I noticed a big difference between is05 and is13 - In is05 the CTRL concept is being used, while in is13 it is not. The mainISR between these two labs is very different. Can you please explain this? Seems like a big change between these two labs.
4. What happens is a estWaitTime is 0 ? e.g. pUserParams->estWaitTime[EST_STATE_LS] = 0;
thank you!
