Part Number: TMS320F28388D
Other Parts Discussed in Thread: C2000WARE
Hi,
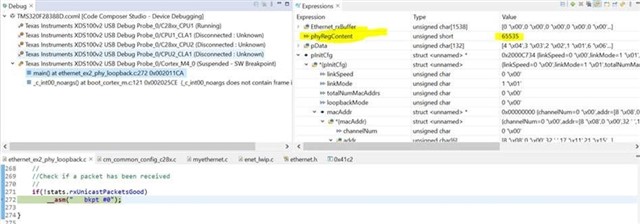
customer uses the DP83825 instead of the DP83822 on their HW now. The C2000ware Eth examples didn't work anymore. I read that only the ID's (PHYIDR2, reg 0x3) are different. In which file do I have to change it? Are there any other things my customer has to change?
Regards, Holger