


Other Parts Discussed in Thread: C2000WARE, , SYSCONFIG, TMS320F280039C
Hello,
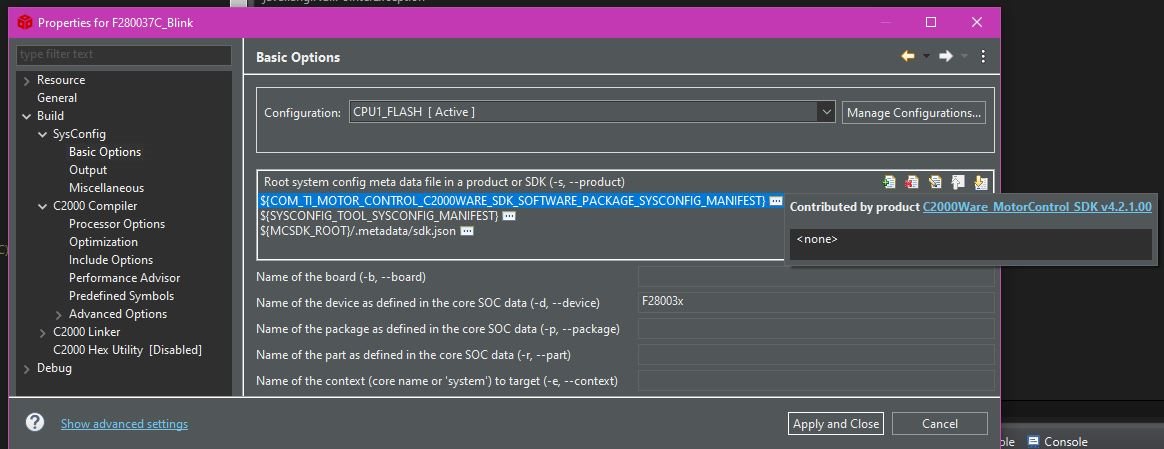
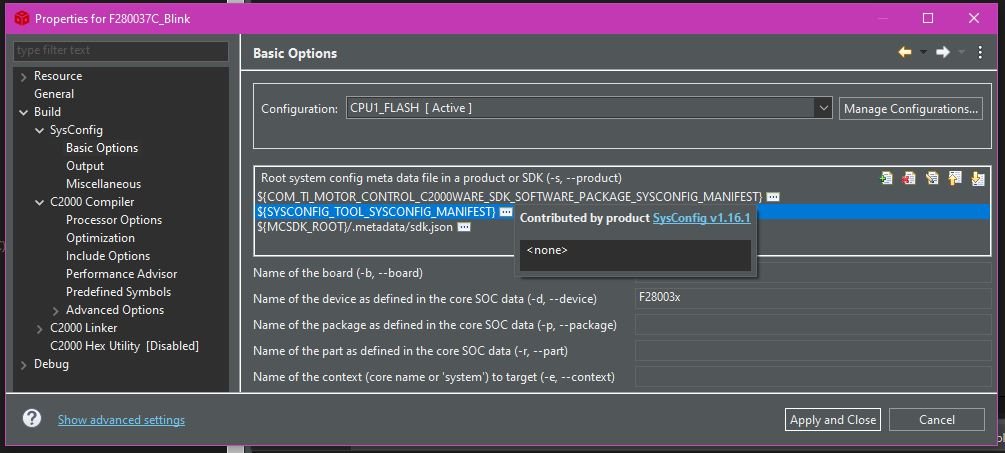
I have custom hardware with a 64 pin F280037C, and I am using the system configuration tool to set up the project.
Eventually I plan to implement the TI MotorControl SDK settings as well.
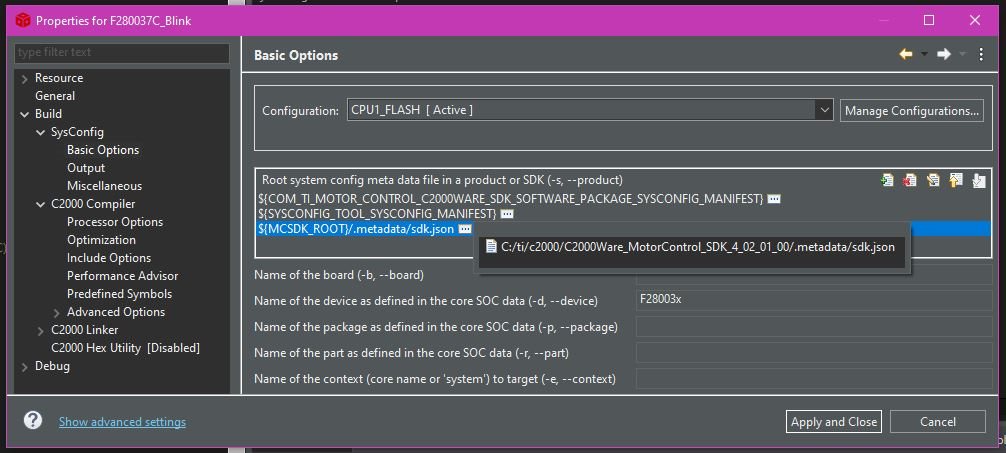
I have used the following path in the MotorControl SDK to start c2000.syscfg:
\C2000Ware_MotorControl_SDK_4_02_01_00\solutions\universal_motorcontrol_syscfg\f28003x\"
The debug configuration successfully connects and tests to the processor, so my hardware seems to be working.
I have tried compiling the project with:
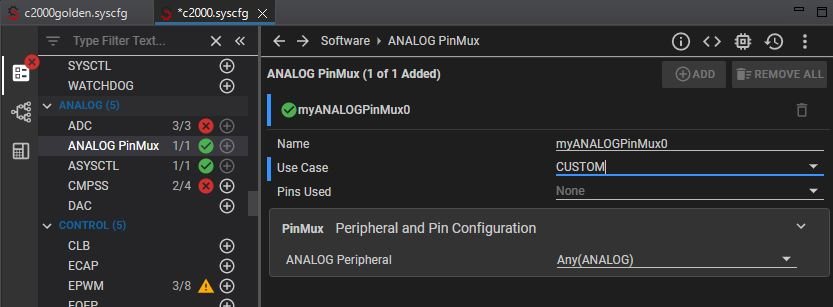
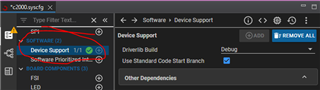
A fully configured c2000sys.cfg file
A 'blank' c2000sys.cfg file.
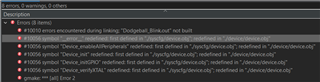
The same error below pops up for each.
I have attached the 'blank' c2000.syscfg file
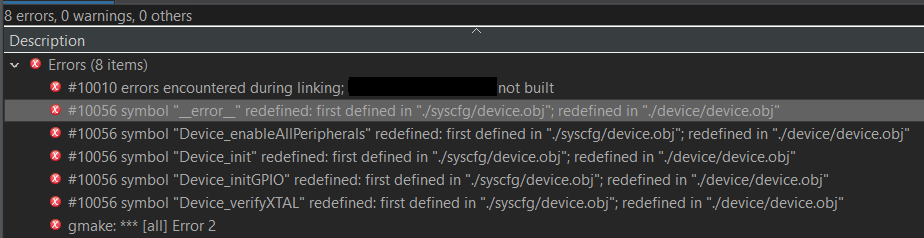
This code is auto generated and conflicts with itself.
Any idea how to get past this?
(edit: typo)













{kind=link}