Other Parts Discussed in Thread: CONTROLSUITE, TIDM-1008, BOOSTXL-POSMGR
Hello,
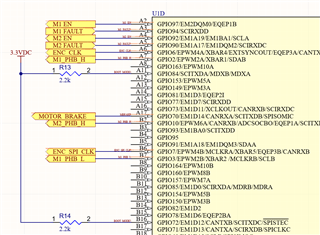
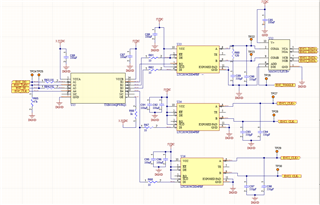
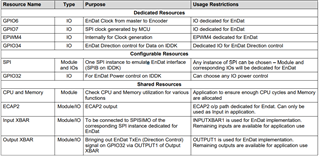
I have been trying to establish communication to two endat2.2 encoders using the position manager CLB library. I am running into issues with setting up the SPI to issue and read commands. I am using the endat example software provided by ControlSuite. It sets the SPIB as a slave and handles the initialization routine required to transmit position data. Currently I am not seeing any of the commands being issued on the SOMI signal, any change in value of the GPIO34 signal that is dedicated to toggle the read/write of the RS-485 transceiver, nor seeing a clock being generated by GPIO7 which is configured as EPWM4.
I tested GPIO34 by itself and am able to set it high or low. By setting the SPIB to master, I can see that it is also connected properly as I can see data pass through the SIMO and CLK which is tied to GPIO7. A potential mistake on my part is not tying GPIO27 which is SPISTEB to ground. A misunderstanding on my part believing that it was unused given that there is no CS line needed for the encoders, but since the MCU is the slave, I can understand why it would be required to enable the SPIB. Nonetheless, I have access to the SPISTEB on the GPIO23 pin and have selected that as the SPISTEB and tied it to ground, with no success.
I have modeled every other part of the design based on a TI Motor Drive dev kit and have attached the relevant schematic drawings. Any troubleshooting advice would be appreciated. I am interested to know why the GPIO34 isn't toggled by the CLB library, my clock is hanging in a high state instead of looking like a PWM wave, and why my SOMI line remains low when I expect it to be issuing the commands necessary to establish communication.