Part Number: TMS320F280037C
Other Parts Discussed in Thread: LAUNCHXL-F280049C, BOOSTXL-DRV8320RS
Hello,
I am trying to verify proper current sensing and gate driving.
I have already verified the ADC is measuring the current it is receiving, which is to say on a resistive load if the shunt sees 1 ampere, the F280037C sees feedback from an opamp that correlates to 1 amp.
I have verified the offset calibration stage, so it centers the current on zero (though it is a bit noisy, +/- 0.4 A, seems to be buck converter switching noise).
I have verified the PWMs are switching to precisely what is commanded with 'HAL_writePWMData', and I have configured the dead band on the gates to be a bit longer than the sum of the on/off switch times for the MOSFETs.
I have verified the motor on an evaluation kit (LAUNCHXL-F280049C) to use open loop control, and it spins slowly and quietly. I exported the motor variables identified by the InstaSPIN lab to the Universal Motor Control lab parameters, especially the open loop control variables:
#define USER_MOTOR_FREQ_MIN_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (500.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (20.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (450.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (2.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (24.0) // Volt
Setting the system to build level 2, I am expecting the system to behave similarly, yet the motor screeches loudly, jitters/rotates a bit, then the system throws an overcurrent fault and halts.
Yesterday I set up the datalog to get a better look at the system. (edit: clarified) The datalog seems to be correctly displaying the ADC readings, but possibly not the open loop angle generator..
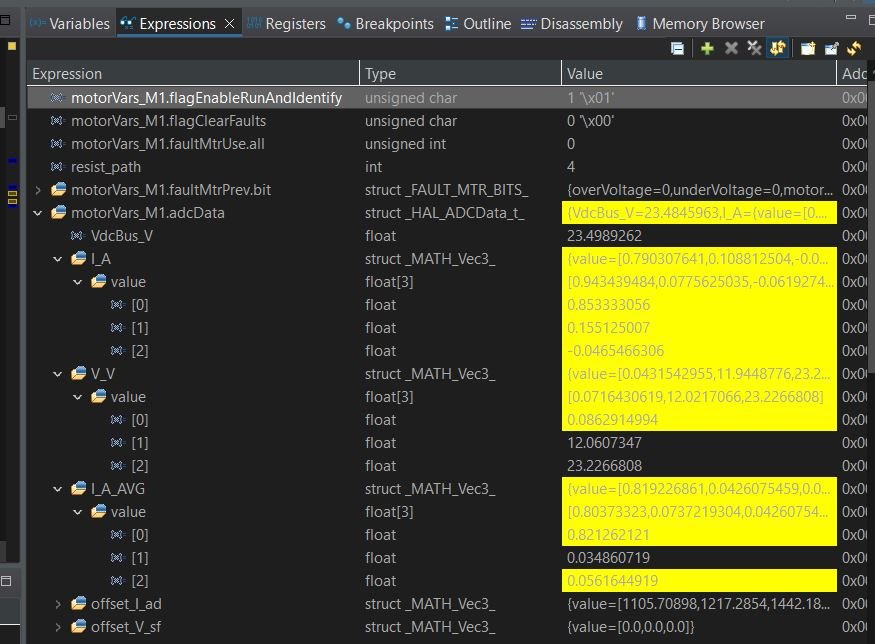
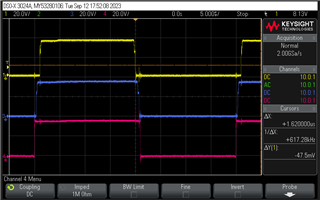
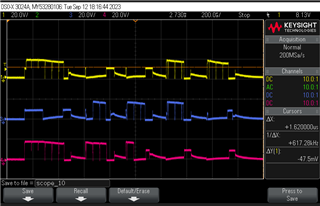
From my custom board (this is with the motor sitting still, flag to run set to 0, since it will not spin)
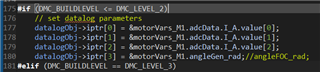
Top left: phase A current feedback.
Top right: phase B current feedback.
Bottom left: phase C current feedback.
Bottom right: angleGen_rad
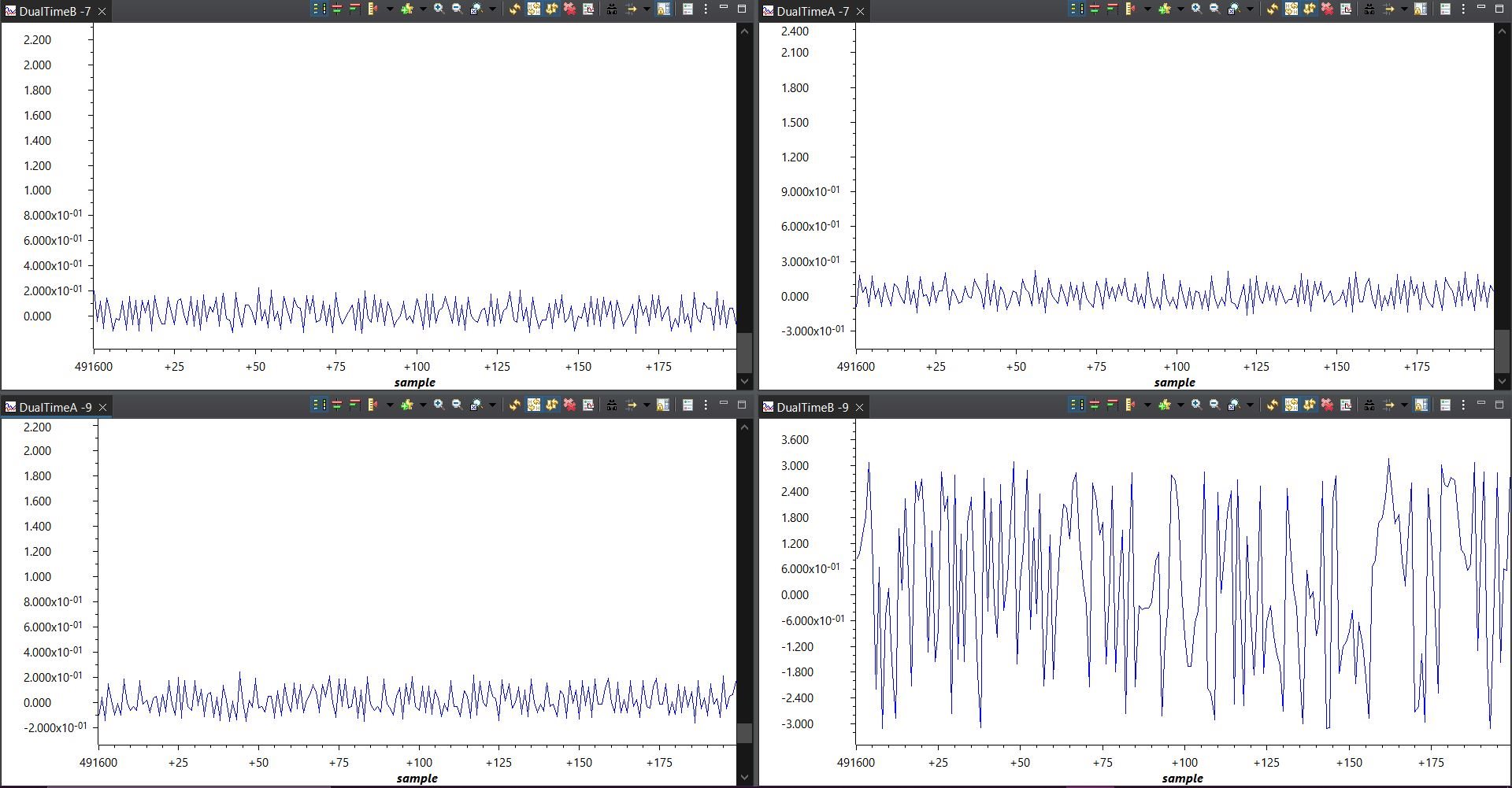
The angle generator graph looks like garbage, except it is correctly within the bounds of -pi to +pi
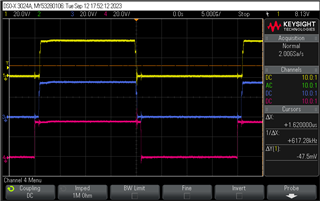
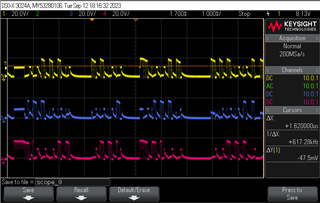
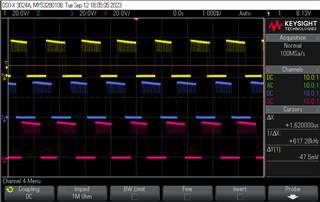
Compared to the evaluation kit (similar setup, flag to run set to 0 to compare):
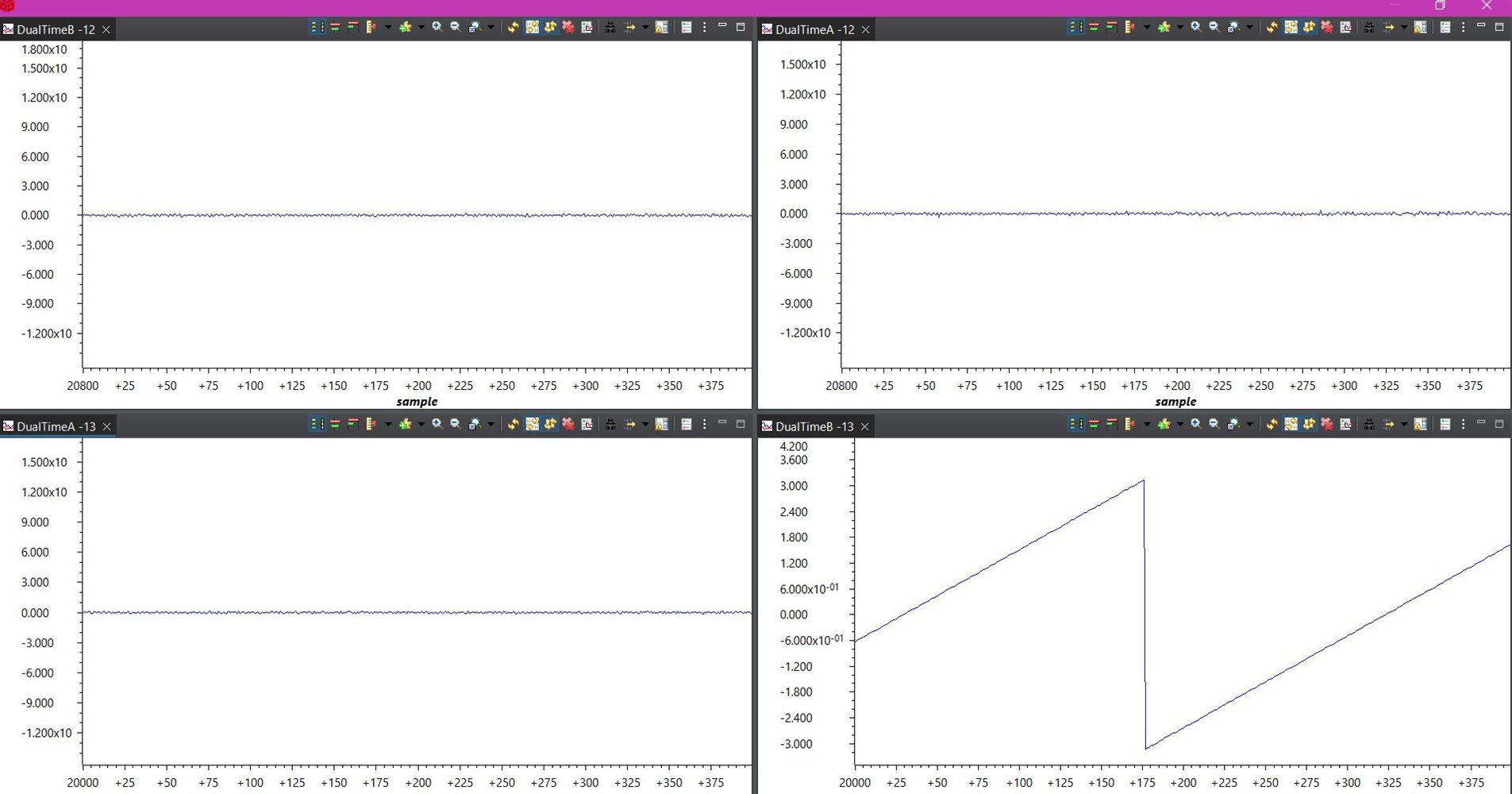
What could be going on?
How do I get my motor spinning on my board?